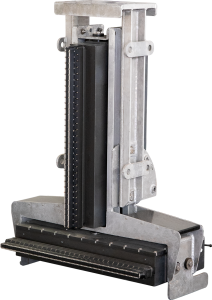

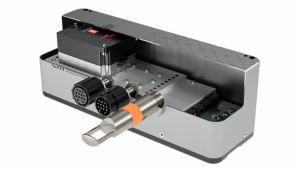
Gemini 620pd
Multibeam Profiling Sonar
The Gemini 620pd benefits from the latest technological advances in signal processing. These advances allow the 620pd to produce high performance bathymetry data, which is in turn output to industry recognized survey packages for processing. Designed for Remotely Operated Vehicle (ROV) mounting, the Gemini 620pd is manufactured in titanium and rated to an operational depth of 4000m.
Tritech International ltd
Westhill, GB
Description
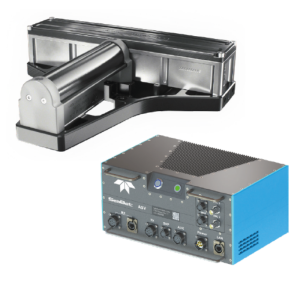
Operating at 620kHz the Gemini 620pd is able to provide 10mm range resolution results with an angular resolution of 1° over a maximum swathe of 130°. The Gemini 620pd is able to deal with more varied environments, while continuing to provide high accuracy performance. The Gemini 620pd software has been designed to provide the user with the ability to easily and effectively optimise the performance of the system. Automatic bottom tracking, variable gate setting, gate tilting as well as roll compensation are some of the automated features that ensure a survey can be completed, with minimal user interaction during operation. Users can choose from a selection of beam patterns, allowing the 620pd to be used in a wide variety of survey applications. A Gemini Hub enables the user to connect up to 2 Gemini 620pd heads. The Gemini Hub is connected to a PC or laptop and ensures data from other survey systems (i.e. GPS, Gyro, MRU and SVS) are accurately synchronised.
Specifications
-
Physical properties of transducer head
-
Length [m]
0.474
Width [m]
0.17
Height [m]
0.14
Min. external power [V]
22
Max. external power [V]
75
Max. power consumption [W]
37
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
Real-time integration of SV-profile
N
Explanation of SV-profile application process
-
-
Maintenance criteria
-
Mean time before failure [hr]
0
Mean time to repair [hr]
0
-
Interfaces
-
Compatible software
Hypack Hysweep, QPS QINSy, EIVA Naviscan
Compatible hardware
Motion,Heading, SVS, GPS
Real-time access procedure
Gemini Software
-
Motion compensation
-
Motion sensors compatible to the system
TSS 1, POS-MV
Required pitch uncertainty [deg]
0
Required roll uncertainty [deg]
0
Required heave uncertainty [m]
0
Motion stabilized
Y
-
Mounting and deployment
-
Mounting
-
Used Sonar Methods
-
Type of system
Multibeam Echosouder
Bottom Detection Method
Amplitude or Phase
Sonar type
Beam-forming
-
System Parameters
-
Min. frequency [kHz]
620
Max. frequency [kHz]
620
Min. depth [m]
0.5
Max. depth [m]
50
Depth resolution [mm]
10
Max. Slant Range [m]
120
Max. swath as a function of depth
4
Max. pings / second
256
Ping frequency [Hz]
50
Min. beam width across track [deg]
1
Min. beam width along track [deg]
1
Number of selectable frequencies
0
Available frequenties
620kHz
Simultaneous multiple frequencies
No
High resolution mode
No
Number of beams
256
Pulse length
25 - 200μs (range dependent)
-
Bottom Coverage
-
Footprint in nadir direction [m]
0
Footprint at max. horizontal range [m]
0
Smallest identifiable cube [m3]
0
Max. swath width [m]
130
Equal footprint spacing
Y
Max. number of points per ping for side scan operation
0
Equi-angular/equi-distant mode
Backscatter
N
Water column
N
-
Uncertainty
-
RMS of nadir depth measurement [m]
0
Intended S44 order
Special
Max. survey speed for specified RMS [kt]
0
-
More information
-
Distinguishable features
Automatic bottom tracking, Roll compensation,Gates
-
General
-
Date of first release
2014








{kind=link}