Description
Specifications
-
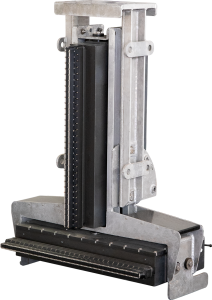
Physical properties of transducer head
-
Height [m]
0.5
Min. external power [V]
12
Max. external power [V]
30
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
-
Interfaces
-
Compatible hardware
SVP; heading; DGPS etc
Real-time access procedure
Basic rawbottom with raw coverage
-
Motion compensation
-
Motion sensors compatible to the system
SMC; TSS DMS etc.
Required pitch uncertainty [deg]
0.01
Required roll uncertainty [deg]
0.01
-
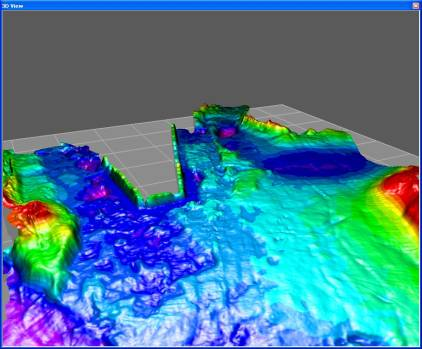
Used Sonar Methods
-
Type of system
Interferometric
Bottom Detection Method
Automatic; manual
-
System Parameters
-
Min. frequency [kHz]
100
Max. frequency [kHz]
155
Max. depth [m]
100
Depth resolution [mm]
50
Max. Slant Range [m]
150
Max. swath as a function of depth
10
Max. pings / second
3000
Ping frequency [Hz]
48
Min. beam width along track [deg]
2
-
Uncertainty
-
Intended S44 order
1
Max. survey speed for specified RMS [kt]
5
-
More information
-
Distinguishable features
System, designed for economical shallow water surveying, even 1-2m. Ideal for coastal surveying and harbours or inland waterways.
-
General
-
Date of first release
2001





{kind=link}