









3DSS-iDX
Integrated Shallow Water Mapping/Imaging System
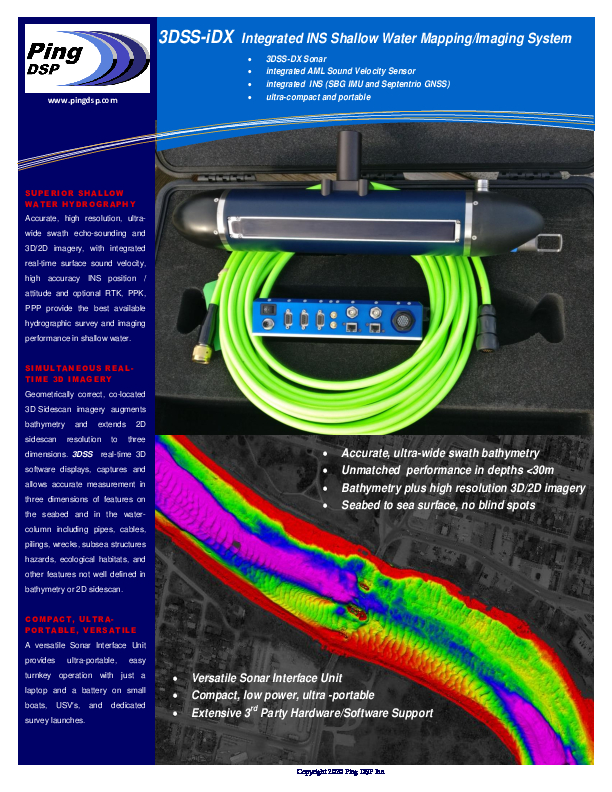
The 3DSS-iDX utilizes state-of-the-art acoustic transducer array technologies, SoftSonar(TM) electronics, and advanced signal processing techniques to produce superior swath bathymetry and 3D side-scan imagery in a compact survey package. The 3DSS-iDX is a complete hydrographic/3D imaging sonar and INS for portable, turnkey, survey applications.

Ping DSP
North Saanich, CA
Description
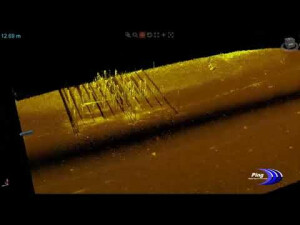
3DSS-iDX incorporates a patented signal processing methodology that extends the single angle-of-arrival principle used in interferometric systems to accommodate multiple simultaneous backscatter arrivals (e.g. the seabed, sea surface, water-column, and multipath). The result is superior wide swath bathymetry and true 3D sidescan imaging and from a compact, easy-to-use sonar.
The iDX-450 integrates SVT and MRU sensors into the sonar head and a dual receiver GNSS into the advanced Sonar Interface Unit (SIU) to form a turnkey Sonar/INS system for high accuracy shallow water surveying. The 3DSS-iDX sonar can be used standalone or together with an external MRU, GNSS or INS sensor on a fully equipped survey launch or USV / ASV.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Physical properties of transducer head
-
Length [m]
0.57
Width [m]
0.099
Height [m]
0.099
Min. external power [V]
12
Max. external power [V]
28
Max. power consumption [W]
25
Weight in Air
8.5 kg
Weight in Water
5 kg
-
Speed of sound
-
Real-time correction of refraction at transducer head
Y
Real-time integration of SV-profile
Y
Explanation of SV-profile application process
AML MicroX at sonar head for real-time collection. Data accommodated in post processing.
-
Interfaces
-
Compatible software
Ping DSP Inc Sidescan3D(TM) Real-time display software. Hypack, Caris HIPS/SIPS, SonarWiz, QINSy, PDS2000. 3rd party software integration continuously expanding.
Compatible hardware
Internal SBG Ellipse2-E. Optional GPS interface and compatible with most GPS and DGPS instruments (with or without PPS time synchronization). Optional MRU interface and compatible with most MRU and IMU instruments.
Real-time access procedure
Ethernet TCP supporting multiple clients.
-
Motion compensation
-
Motion sensors compatible to the system
Internal SBG Ellipse2-E. Optional external MRU interface.
Required pitch uncertainty [deg]
0.05
Required roll uncertainty [deg]
0.02
Required heave uncertainty [m]
0.02
Motion stabilized
Y
-
Mounting and deployment
-
Mounting
Portable
Retractable
N
-
Used Sonar Methods
-
Type of system
CAATI 3D Sidescan (Not interferometric)
Bottom Detection Method
Computed Angle-of-Arrival Transient Imaging
Sonar type
Interferometric
-
System Parameters
-
Min. frequency [kHz]
450
Max. frequency [kHz]
450
Min. depth [m]
1
Max. depth [m]
75
Depth resolution [mm]
13
Max. Slant Range [m]
150
Max. swath as a function of depth
16
Max. pings / second
50
Ping frequency [Hz]
50
Min. beam width across track [deg]
0.25
Min. beam width along track [deg]
0.4
Number of selectable frequencies
1
Available frequenties
450 kHz
Simultaneous multiple frequencies
No
High resolution mode
Yes
Number of beams
1024
Pulse length
22 microseconds
-
Bottom Coverage
-
Max. swath width [m]
200
Equal footprint spacing
Y
Max. number of points per ping for side scan operation
15000
Equi-angular/equi-distant mode
Equi-angular, Equi-distant
Backscatter
Y
Water column
Y
-
Uncertainty
-
Intended S44 order
Special
Max. survey speed for specified RMS [kt]
4
-
More information
-
Distinguishable features
Superior wide swath 3D imagery/bathymetry, compact
-
General
-
Date of first release
2018
Documents
Brochure
3dss-idx-brochure.pdf
839.22 KB





{kind=link}