
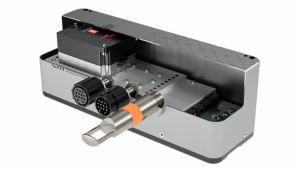

Description
Operating vessels at sea is, by its very nature, a highly challenging activity. In order to undertake tasks such as wave height monitoring, using cranes during rough weather, or determining where vessels are using dynamic positioning, roll, pitch, yaw and heave motion needs to be measured. This is where Motion Reference Units (MRUs) come in and Kongsberg has been a leader in this field for over 20 years.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Height [m]
0.14
Material
Anodised aluminium
-
Environmental
-
Max. operating temperature [°C]
55
Splashproof casting
Y
Water resistant casting
N
Vibration and operating shock tolerance
IEC 60945/EN 60945
Electromagnetic compatibility
IEC 60945/EN 60945
Mounting orientation
Connector must be pointing up or down.
Min. operating temperature [°C]
-5
-
Power
-
Min. Voltage (DC)
10
Max. Voltage (DC)
36
Power consumption [W]
5.5
-
Roll and Pitch Output
-
Roll and pitch measurement
Y
Angle accuracy static in ° [RMS]
0.08
Angle accuracy dynamic in ° [RMS]
0.08
Resolution angle [°]
0.001
Angular roll/pitch range [°]
45
Angular rate range [°/s]
100
-
Interfaces and Data
-
Ethernet port
Y
RS232 output
Y
RS422 output
Y
Other output ports
Three output and one input: Bidirectional RS-422 from junction box, user configurable RS-232, RS-422.
Data output rate
200 Hz, Ethernet UDP/IP 10/100 Mbps
Data output protocols/formats
The MRU 3 outputs roll, pitch and heave together with linearacceleration in 3-axes. The MRU 3 outputs heave position andvelocity. In addition roll and pitch angles and correspondingangular rate vectors are output.
Velocity input data and formats
The MRU 3 outputs roll, pitch and heave together with linearacceleration in 3-axes. The MRU 3 outputs heave position andvelocity. In addition roll and pitch angles and correspondingangular rate vectors are output.
Heading input data and formats
The MRU 3 accepts input of external speed and headinginformation on separate serial lines or Ethernet for improvedaccuracy in heave, roll and pitch during turns and accelerations.For time synchronization the MRU accepts 1-second time pulse(1PPS) input on a TTL line (XIN) or as RS-232/422 signal.
-
Heave Output
-
Max. output heave range [m]
50
Output period real time [s]
0
Heave accuracy real time [%]
5
Heave accuracy delayed [%]
5
-
Acceleration Output
-
Acceleration measurement
Y
Acceleration range m/s2
50
Acceleration noise m/s2 RMS
0.005
Acceleration accuracy m/s2 RMS
0.02
Documents
Brochure
migrationvvrcch.pdf
269.74 KB






{kind=link}