

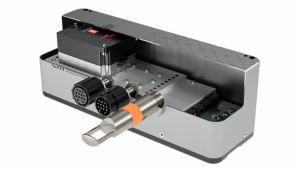
MGC R4
The MGC R4 emphasises on position drift, includes three Ring Laser Gyros and three linear accelerometers.
The MGC R4 product is a fully inertial navigation system (INS). It can output heading, roll, pitch, heave and position. Acceleration and velocity of linear motions, as well as angular rates, are output from the unit. The MGC R4 product outputs both processed and raw (gyro and accelerometer) sensor data.

Kongsberg Discovery
Horten, NO
Description
The MGC R4 can be used as a stand-alone unit or as an IMU in other systems. The product is designed for high precision maritime applications such as offshore operations and seabed mapping. The product includes integrated navigation algorithms with input from a GNSS receiver for output of aided position and heading data. The proven PFreeHeave® algorithms are part of the navigation algorithms that enable down to 2 cm accuracy in delayed heave output and 3 cm accuracy in real-time heave output. The linear position and velocity measurements can be output in up to four different points on the vessel. Function The MGC can operate in Gyrocompass mode and Integrated Navigation mode. In the Gyrocompass mode only, input of speed is required. In this mode the product will output heading, roll, pitch and heave accurately. In the Integrated Navigation mode, input of speed, position and PPS from a GNSS receiver is required (VTG, GGA, ZDA). In this mode the product will output heading, roll, pitch, heave and position. The unit is delivered with Windows based configuration and data presentation software, the MRC+. In this software vector arms from where the MGC is mounted to the center of gravity (CG) and two individually configurable monitoring points (MPs) can be defined. The heave measurements can be output in four different locations (the MGC itself, CG, MP1 and MP2) simultaneously on serial lines or Ethernet ports. A typical measurement point is the echo sounder transducer head. Variables output The MGC outputs heading, roll and pitch and corresponding angular rate vectors. The unit outputs relative (dynamic) heave position, velocity and acceleration. In the Integrated Navigation mode it also outputs position in north and east direction in addition to height above the ellipsoid. Digital I/O protocols MGC data is available through both Ethernet interface and serial lines enabling easy distribution of data to multiple users on board the vessel. Output protocols for commonly used survey equipment are available on two individually configurable serial lines and Ethernet/UDP.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Type of application
Documents
Brochure
datasheet_mgc_r4.pdf
Videos






{kind=link}