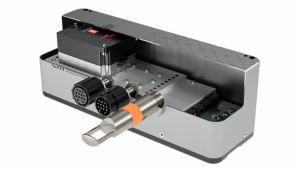
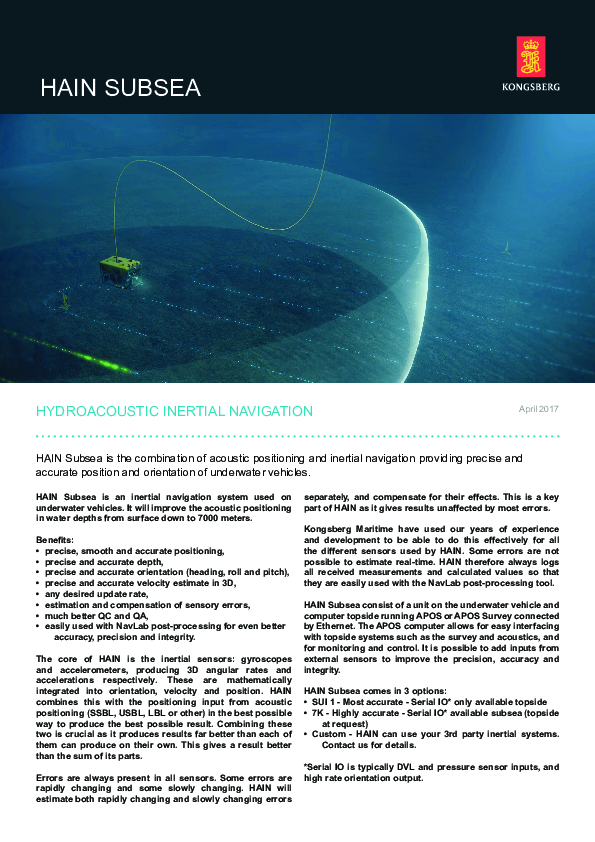
HAIN Subsea
The HAIN computer receives the aiding positions (latitude and longitude) from an acoustic positioning operator station via an Ethernet interconnection and will limit the position drift that is inherent in inertial navigation systems. ROV position, attitude, speed and expected accuracy of the data is sent to the acoustic positioning operator station, at a 1Hz update rate. The source of the aiding position can be SSBL, LBL or both.

Kongsberg Discovery
Horten, NO
Description
The HAIN computer receives the aiding positions (latitude and longitude) from an acoustic positioning operator station via an Ethernet interconnection and will limit the position drift that is inherent in inertial navigation systems. ROV position, attitude, speed and expected accuracy of the data are sent to the acoustic positioning operator station, at a 1 Hz update rate. The source of the aiding position can be SSBL, LBL or both.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Other specifications
-
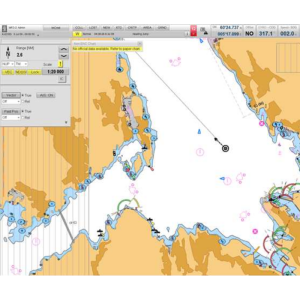
Graphical user interface
Y
Typical application
Attitude heading; and positioning of tethered subsea vehicles (ROV; ROTV; Tow fish).
Distinguishable features
Stable and continuous attitude; heading and position output. Increased position and depth accuracy; further increase by use of post-processing (NavLab).
Export restrictions
Depends on configuration
-
Environmental
-
Max. rotation speed [deg/s]
400
Min. operating temperature [°C]
-15
Max. operating temperature [°C]
55
-
Software
-
Name
HAIN
Filtering
Y
Adaptable filter strength
Y
Adaptable input signals
Y
Integrity monitoring of position input
Y
Integrity monitoring of log input
Y
Max. number of position input signals
1
Max. number of log input signals
1
Maximum latency of log input [ms]
1000
Uncertainty indicators given in output
Std.dev.
Uncertainty of time stamp for output [ms]
1
-
Doppler log aided uncertainty
-
Heading [deg]
0.03
Pitch [deg]
0.01
Roll [deg]
0.01
-
GNSS aided uncertainty
-
Heading [deg]
0.03
Pitch [deg]
0.01
Roll [deg]
0.01
Increase in position uncertainty w.r.t. stand-alone GPS [m]
3
-
General
-
Year of initial development
2003
Height [m]
0.28
Width [m]
0.24
Length [m]
0.24
Weight [kg]
30
Min. Voltage (DC)
16
Max. Voltage (DC)
72
Power consumption [W]
15
Splashproof casting
Y
Water resistant casting
Y
Water resistance [m]
4000
Mean time between failures [hr]
37000
Type of accelerometer
QA2000
Type of gyro
GG1320AN
Removable from base plate
N
Type of application
Marine
Moving parts
Y
-
Unaided uncertainty
-
Heading [deg]
0.03
Pitch [deg]
0.01
Roll [deg]
0.01
Decrease in position accuracy [m/hr]
1500
-
Data formats
-
NMEA formats
THS
RTCM
N
Other
Several
-
Inertial Measurement Unit
-
Accelerometer bias [µ-g]
25
gyro bias [deg/hr]
0.003
Calibration procedure
N (only for DVL/INS)
Documents
Brochure
migrationkdiyon.pdf
492.27 KB
Other documents
-
Product Manual (9)2.74 MB
-
High Resolution Bathymetry from ROV Mounted EM2040 andHAIN Inertial Navigation.541.79 KB






{kind=link}