
Description
Specifications
-
Environment
-
Non-operating shock tolerance [g]
5000
Min. operating temperature [C]
-40
Max. operating temperature [C]
85
Splashproof casting
N
Water resistant casting
N
-
Power Supply
-
Min. Voltage (DC)
6.0
Max. Voltage (DC)
3.3
Power consumption [W]
22
-
Accelerometers
-
Num. of Accelerometers
1
Range [max g]
16
Resolution [mg]
14
Noise
90μg/√Hz for ±2g & ±4g range 110μg/√Hz for ±8g ran
Alignment Error [ ± ° ]
2
-
Operational
-
Interfaces
USB, UART
Other interfaces and additional information
Can also be used through either SPI connection, or an I2C connection.
Output data formats
quaternion, Euler angles (pitch/roll/yaw), rotatio
Output frequency [ Hz ]
1750
-
Gyroscopes
-
Num. of Gyroscopes
1
Resolution [ ° / s ]
16
In-Run Bias Stability [ °/ hr]
2.5
Noise
0.007º/sec/√Hz
-
General
-
Year of last update
2017
Year of initial development
2017
System components
Accelerometer(s), Gyroscope(s), Magnetometer(s)
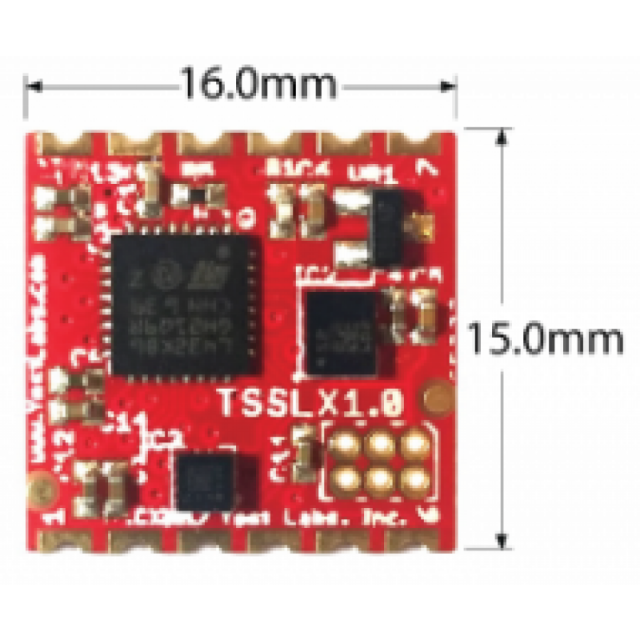
Height [mm]
15
Width [mm]
1.696
Length [mm]
16
Weight [gr]
.5
-
Magnetometers
-
Num. of Magnetometers
1
Range [ ± Gauss ]
49.152
Resolution [ microtesla ]
16
Non-linearity [ max % ]
0.1
-
Additional specifications
-
Application
Robotics Motion capture Positioning and stabilization Personnel/pedestrian navigation and tracking Unmanned air/land/water vehicle navigation Education and performing arts Healthcare monitoring Gaming and motion control Accessibility interfaces Virtual reality and immersive simulation
-
Accuracy
-
Heading static accuracy [ ° ]
2
Heading dynamic accuracy [ ° ]
2





{kind=link}