


Description
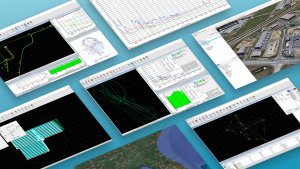
GrafNav post-processing software is a powerful, highly configurable processing engine that allows for the best possible static or kinematic GNSS accuracy using all available GNSS data.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
Options
-
INS Integration
N
Offline operability
Y
Interface
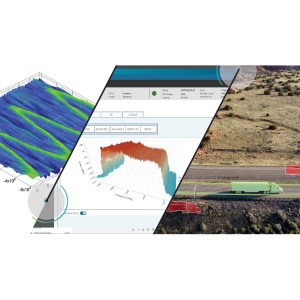
Windows based Graphical User Interface, full suite of data and solution visualization and diagnostic tools is available for quality assurance.
Other
GrafNav supports multi-base processing for projects that cover large areas. A float static solution is available for long and/or noisy baselines. Built-in ionospheric processing improves accuracies for dual-frequency users.
-
General
-
Area of Application
Marine, Airborne, Land
Type
Post-processing
Compatible Receivers
Support of data formats from most single and multi-frequency commercial receivers
Area of application
Marine, Airborne, Land
Processing type
Post-processing
-
Requirements
-
Operating System
Windows
-
Corrections base
-
DGNSS
Y
SBAS
Y
Signal
IP
Other
Precise satellite clock and orbit data can be downloaded from within GrafNav to achieve sub-5 cm position accuracy using PPP with kinematic trajectories. The software can easily make use of project specific base station data, or use publicly available reference station data to achieve centimetre level position accuracy.
-
Technical specifications
-
Coverage
Full geoid support for the US, Canada, Japan, Australia, Mexico, France, UK, Ireland and more.
-
Miscellaneous
-
Subscription
Global
Subscription plans
software packages are available as a digitally secured machine-portable license, perpetual license or time-limited term license.
Distinguishable features
Multi-constellation GNSS Processing, GNSS Heading, Precise Point Positioning, Multi-base Station Support, Software Development Kit, Kinematic Data Processing.
Typical applications
Many applications where absolute position accuracy is critical. For these applications, the accuracy of the GNSS position and velocity solution can be greatly improved by post-processing.
Documents
Brochure
00191579637d5b7ede95d?authid=4AxY37U3TTL8&utm_source=geo-matching&utm_medium=web&utm_campaign=Global_CA_Geomares(geo-matching.com)







{kind=link}