






What makes up a full Lidar Survey Solution?
At OxTS we talk a lot about helping organisations to build ‘full survey solutions’. But what is a full survey solution and furthermore, why should you care? There’s no getting away from it. It takes a lot of patience when it comes to surveying. Depending on the type of survey you’re conducting, and what you’re looking to achieve, there are many components at play. Moreover, these components need to work together in unison for you to accomplish what you set out to do. So, what are the components of a full survey solution we talk about? Here we’ll examine them in a little detail.
Hardware
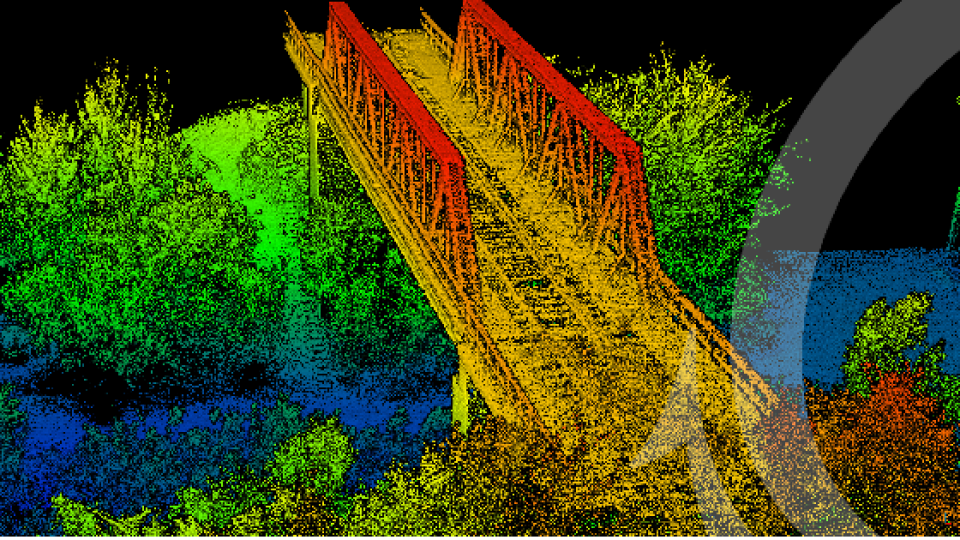
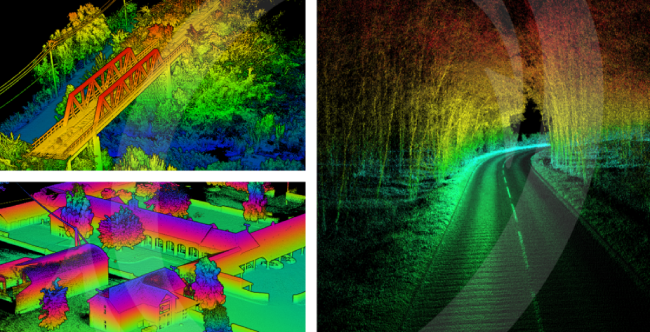
We’ll begin by looking at the hardware. When we discuss surveying solutions, we’re primarily talking about Lidar survey. Lidar surveying is becoming more popular. This is in part because the data gathered can be used to create 3D point clouds. A pointcloud is a set of data points, that when collected and processed, creates a 3D representation of the world. A pointcloud can be used time and again to inform project decisions – making it a valuable resource.
Lidar - It goes without saying that to conduct a Lidar survey and create a pointcloud you need a Lidar sensor. There are many Lidar sensors available today, each with its own specialist application use cases. The price points vary dramatically too. Smaller commercially available scanners can cost as little as £1500 whereas a more high-end scanner can set you back upwards of £750,000.
The type of survey you want to conduct will naturally help you decide which type of scanner you need. For example, if you want to conduct a long-baseline survey using a UAV/drone, the size and weight of the Lidar will need to be considered.
Also, different Lidar scanners output at different rates. The higher the number of points per second the sensor outputs, the denser the point cloud may be. There are many other factors that affect pointcloud precision including the precision of the Lidar sensor itself, its range and power over range amongst other things.
Inertial Navigation System (INS) - So, you’ve chosen your Lidar sensor, now what? As mentioned earlier there are a few factors that can affect pointcloud precision. Depending on the type of survey you’re conducting (static vs mobile) you may need to fuse inertial data with your Lidar data.
A static Lidar survey doesn’t need to account for changes in position, heading, pitch/roll or time. Mobile surveys, however, do.
A small error in any of the factors mentioned above can make the resultant pointcloud unusable. Therefore, when conducting a mobile survey, the data produced by the Lidar sensor will need to be fused with precise inertial data from an INS to help ensure accuracy.
The INS will output highly accurate position, navigation and timing information which when combined with the Lidar data will allow the sensors to build up to create a 3D representation of the environment in any given position and at any given time.
The position measurements provided by the INS are generated by onboard GNSS receivers that track multiple satellite constellations (Galileo, GPS, BeiDou & GLONASS). The navigation measurements come from a built-in Inertial Measurement Unit (IMU). This will output highly accurate heading and pitch/roll measurements.
An INS like the OxTS xNAV650 INS will provide the Lidar sensor with a 2 cm position accuracy, a heading accuracy of 0.1° and a pitch/roll accuracy of 0.05°, ensuring pointcloud accuracy is as precise as possible.
Software
INS Software - As discussed, an INS will provide accurate position, navigation and timing information to combine with the Lidar data. But there needs to be a way of setting the INS up so it accurately outputs the required data and allows you to post-process and analyse it.
In many cases (not all!), the software is an additional cost on top of the INS hardware and is necessary to use the device. There are four main functions INS software should perform. These are:
- Configure – The software should assist the user to configure the INS to ensure they are able to produce the best possible data. Simple wizards help to ensure no critical measurements are missed.
- Monitor – A surveyor should be able to monitor their data in real-time and ‘see what their INS is seeing’.
- Post-process –Raw data that is recorded in real-time onto the INS is processed into a useful format through a navigation engine. This method is known as post-processing.
- Analyse – Good INS software will allow for intuitive analysis of survey data. It will provide you with the tools you need to plot, understand and export your navigation data after the survey.
All OxTS INS devices come with our NAVsuite software free of charge. It is included as a complimentary extra when an INS device is purchased from OxTS. You can learn more about the software here – OxTS NAVsuite
Lidar Georeferencing Software - Once you’ve collected the Lidar data, it will need to be georeferenced with the navigation data from the INS. Lidar georeferencing software is used to fuse the two datasets.
The position data (collected by the GNSS receiver) and navigation data (collected by the IMU) will be combined with each point collected by the Lidar sensor. This georeferencing process allows the software to understand the Lidar sensor’s position, its heading and its pitch/roll angles for each point that was collected. It’s this process that enables it to produce a 3D map of its surroundings when mounted on a mobile mapping vehicle or UAV/drone.
However, the process isn’t as simple as combining the two data sets. There are other factors at play that can have a negative effect on results. Surveyors are often left on their own to write programs that will combine the navigation and Lidar data to produce point clouds. Often this is not possible for small scale surveyors who don’t have the time or funds to hire software engineers. It is also a very inefficient industry standard, meaning the same work needs to be repeated for each surveyor, limiting the number of useful additional features that can be added.
OxTS Georeferencer will take care of this step for the surveyor, allowing them to overcome this challenge at a fraction of the cost and with many useful features they couldn’t produce themselves.
To produce an accurate pointcloud the orientation between the navigation (INS) and survey (Lidar) device coordinate frames needs to be measured to the highest possible accuracy. This is very difficult by eye, however, there is software available to aid this process.
Using data to calibrate the angles is one method. You can find out more about this method of boresight calibration here.
OxTS Georeferencer is OxTS’ Lidar georeferencing software. It provides surveyors with the ability to georeference point clouds from a wide range of Lidar sensors. It has several features to help surveyors with the georeferencing process, including a 3D hardware set-up viewer to help input the correct relative rotation angles and a time overlap chart to help surveyors choose the start and end times of their survey. There is also the optional boresight calibration tool that uses data to calibrate the angles between survey and navigation devices.
Possibly the most important aspect of OxTS Georeferencer is that it has a number of LDAR sensors already pre-integrated into the software meaning the difficult integration work is already taken care of.
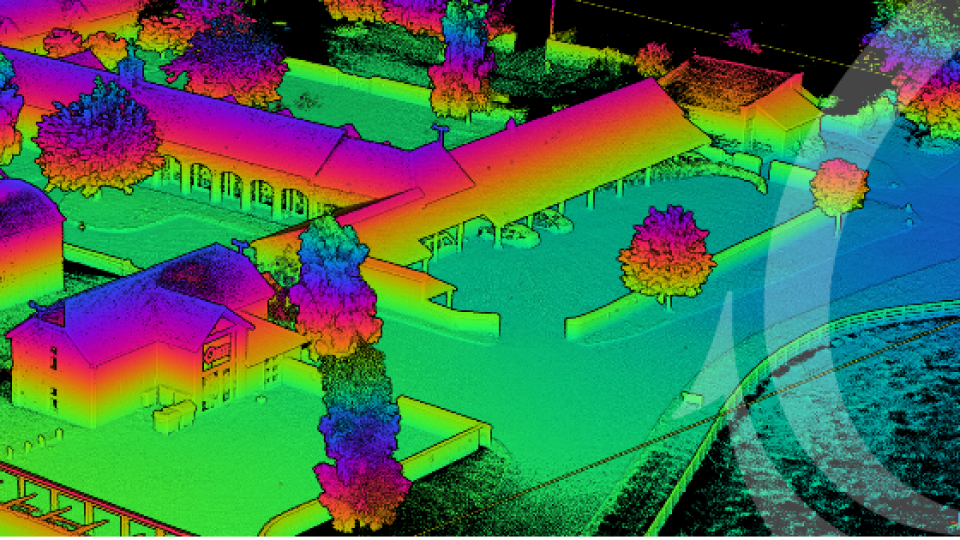
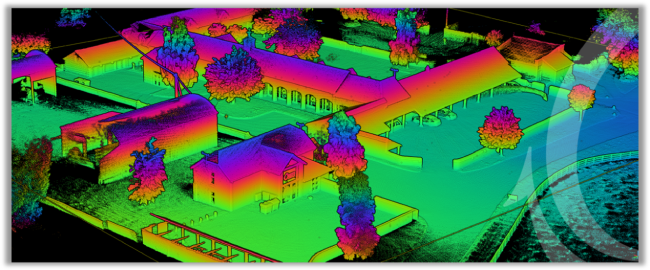
Pointcloud Analysis Software - Once you’ve georeferenced your Lidar data and are able to view your survey, you can upload your data into a 3rd party pointcloud analysis/viewer tool.
There are many free tools available on the internet that will allow you to view and navigate around your pointcloud. At OxTS there is the software we prefer to use, however, there are many free tools available that offer similar features.
The tool we prefer is easy to use and has several features that make it our preferred software. It is easy to change the scalar field that is viewed and simple to alter the colour parameters.
In conclusion
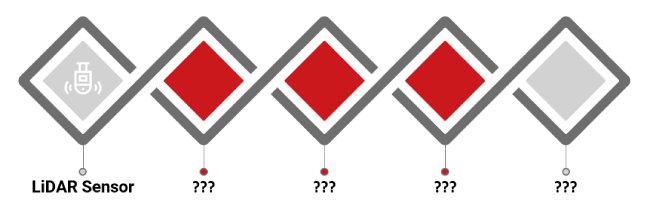
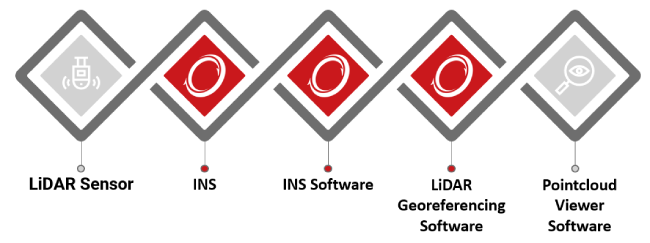
A full Lidar survey solution is made of five key elements. Each of the elements needs to be carefully considered before a purchase is made.
- Will the Lidar sensor give me the required density for my particular application?
- Is my INS the right size and weight for my payload?
- Is the INS software included with my INS purchase?
- Will I need to purchase a 3rd party Lidar georeferencing software solution and will this work with my Lidar?
- What features will I need from my pointcloud analysis/viewer software?
These are just some of the questions you will need to ask yourself before you build your solution.
If you need advice, then please feel free to contact OxTS and we will be happy to talk to you about your survey plans.
Geoff Besbrode
Product Marketing Executive, OxTS
Further Reading...
OxTS Lidar Surveying Brochure - Read
Learn more about Lidar surveying using an OxTS INS. Surveyors can quickly and easily georeference data from multiple Lidar sensors.
OxTS Boresight Calibration Brochure - Read
Learn how using data can help you easily and accurately calibrate the angles between your survey (Lidar) and navigation (INS) devices for ultimate pointcloud accuracy.
OxTS Dronezone Case Study - Read
Learn how Dronezone SRL. were able to cut mobile mapping time down by over 50% through quick and simple INS and Lidar integration.
Do you have questions about this article?
Get in touch with Oxford Technical Solutions - OxTS, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.









{kind=link}