
SLAM-to-BIM with Stonex X120GO Handheld SLAM Laser Scanner
The digitization of the building process is increasingly present on the global scene. The method that leads to 3D models of construction projects and buildings is called BIM, or Building Information Modelling. This method has the great advantage of associating several types of information (spatial, temporal, structural, etc.) to the three-dimensional model. Consequently, it is possible to create an information system that can be shared among the various players involved in the design and construction process of a building.
The BIM model becomes the basis for developing the so-called digital twins, which integrate information about the building over time and provide essential analysis tools for planning maintenance interventions.
BIM has become a requirement for participation in public tenders in many places. Still, more and more professionals in the construction sector have decided to integrate this method into their work for private clients.
Data Acquisition Techniques: Scan-to-BIM
Nowadays, the most used survey methodologies for the creation of BIM are photogrammetry and laser scanning. In both cases, the product of the survey is point clouds, i.e., sets of measured points which hold information about the position of the surveyed elements and possibly their colour. Point clouds are a product that is highly suitable for BIM, as they are already three-dimensional and can be integrated. The process that involves using laser scanner technology to obtain 3D data to be transformed into an integrated BIM model is called Scan-to-BIM. This process can be divided into three phases: the on-site survey of the building with the laser scanner, the processing of the field data to obtain a point cloud via cleaning software, and the alignment of the different scans and then BIM modeling using BIM authoring software. The laser scanner survey allows you to obtain a 3D map of the building quickly.
In the presence of large-sized artefacts or with characteristics, surveys with traditional static lasers (with tripods) can require a considerable amount of time, both for the acquisition of the scans and for the processing of the data (with the need to merge dozens, sometimes hundreds of scans).
For this reason, in recent years, the world of topographic survey has adopted innovative tools that allow you to obtain data on the go, thus reducing scanning and processing times, most notably, SLAM laser scanners.
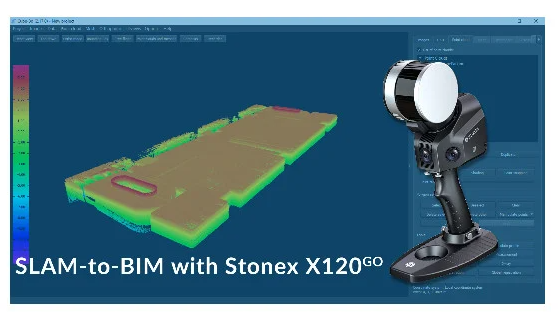
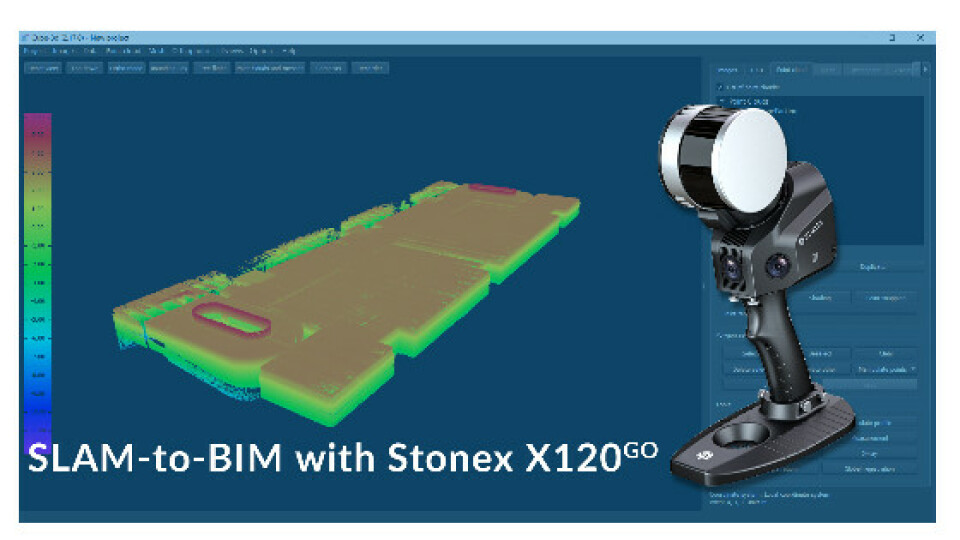
Image 1: Stonex X120GO Handheld SLAM Laser Scanner
What is SLAM?
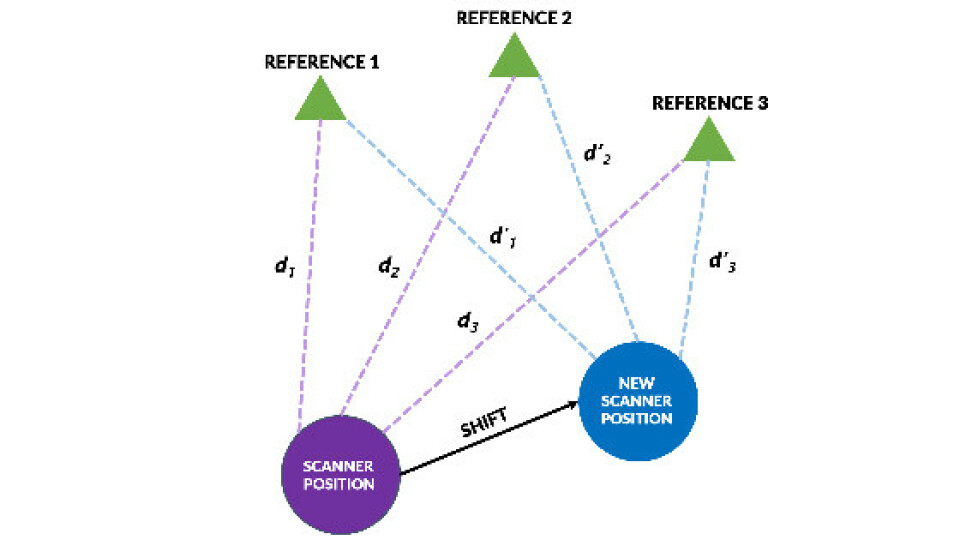
The term SLAM, the acronym for Simultaneous Localization And Mapping, indicates the computational problem of mapping the surrounding environment with moving sensors while at the same time determining the position of the instrument.
Although this problem may be a "dog chasing his own tail", there are several algorithms to solve it, at least approximately. Among the best-known methods, we mention the extended Kalman filter, the GraphSLAM and the so-called particle filters, also known as sequential Monte Carlo methods.
The need to solve the SLAM problem was first addressed in self-driving vehicles, as they needed a way to map obstacles and thus allow navigation without human intervention. In fact, among the first examples of the application of SLAM algorithms, we find planetary rovers.
Due to the several types of sensors and installation methods, the implementation of SLAM technology is mainly divided into laser SLAM and visual SLAM (vSLAM). Among them, laser SLAM was born before vSLAM; therefore, it is more mature in theory, technology, and product realization.
Thanks to recent technological innovations, which have made it possible to develop sensors with a reduced cost, the SLAM has entered everyday life. It is widely used in robotics, autonomous transport, in the fields of AR (Augmented Reality) and VR (Virtual Reality), and lastly, in the field of topographic measurements using SLAM laser scanners.
To apply SLAM algorithms, an instrument must collect data from multiple sensors; in the case of SLAM scanners, it typically consists of a 3D LiDAR head and an inertial measurement unit (IMU). The combination of the information collected by these sensors allows the position of the scanner to be tracked, thus creating an accurate and complete 3D point cloud of the surrounding environment.
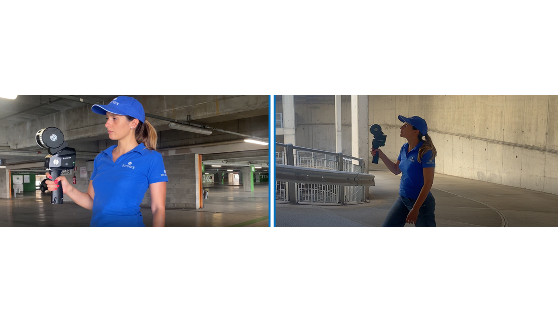
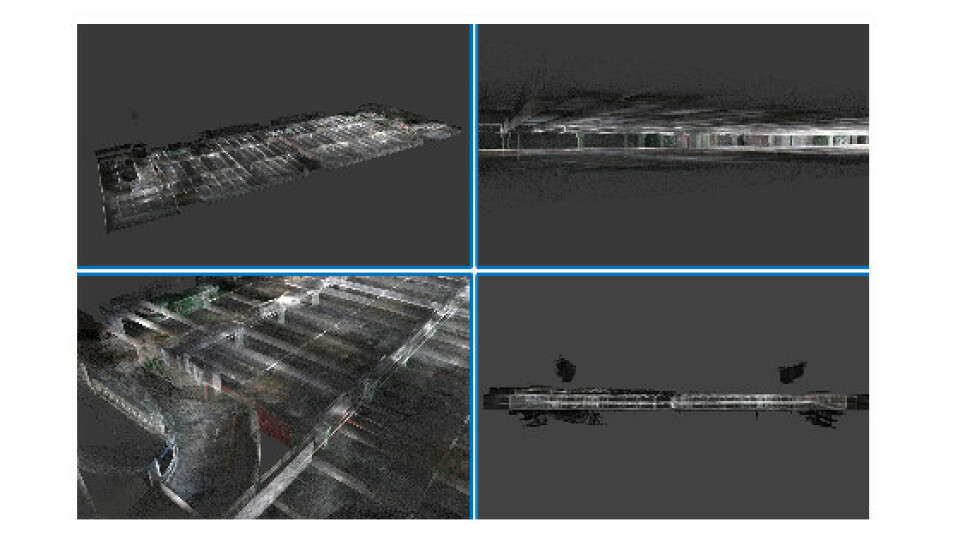
Image 2: SLAM with the Stonex X120GO Handheld Scanner
Stonex X120GO SLAM Laser Scanner
Stonex has developed a solution that combines precise sensors with a robust SLAM algorithm to produce point clouds that are clean, accurate and easily usable for BIM creation: the X120GO SLAM laser scanner.
X120GO has a 360° rotating head, which can generate a 360° x 270° point cloud coverage. Combined with a SLAM algorithm, it can obtain high-precision three-dimensional point cloud data of the surrounding environment without light and GPS. Equipped with three 5MP cameras to generate a 200° FOV horizontal and 100° FOV vertical, capable of synchronously obtaining texture information and producing colour point clouds and partial panoramic images. Both are beneficial features in the BIM authoring phase. Thanks to the range of 120 m (393 ft), X120GO is suitable for outdoor and indoor jobs, even in complex environments, thus allowing you to complete the survey of the entire building with a single tool.
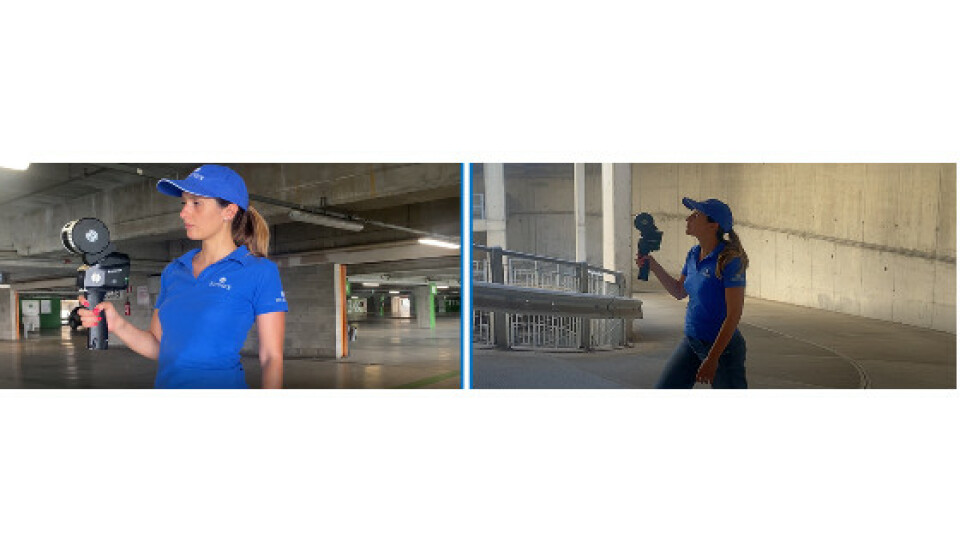
X120GO has a fully integrated structure, which allows you to move smoothly in the scanning environment.
The acquisition is performed with the Android app "GOapp" where it is possible to see the construction of the point cloud in real-time. Once the start button is pressed, X120GO begins operations simultaneously, making data acquisition efficient and convenient.
While getting data, X120GO can also collect coordinates of control points; these can then be matched to known points to georeference the scans.
Thanks to the data download via SD Card, data processing starts at once after the survey. The partnership that Stonex has with PointCab allows you to use this software to obtain information from the point cloud quickly and intuitively through plans and sections. The 4Revit plug-in (supplied by PointCab) allows you to integrate and optimize the Scan-to-BIM workflow to create 3D models in an agile and accurate way.
Stonex can offer complete hardware and software solutions for several projects and needs.
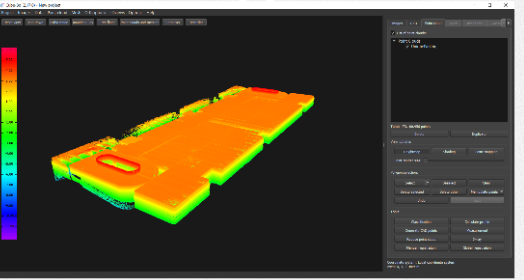
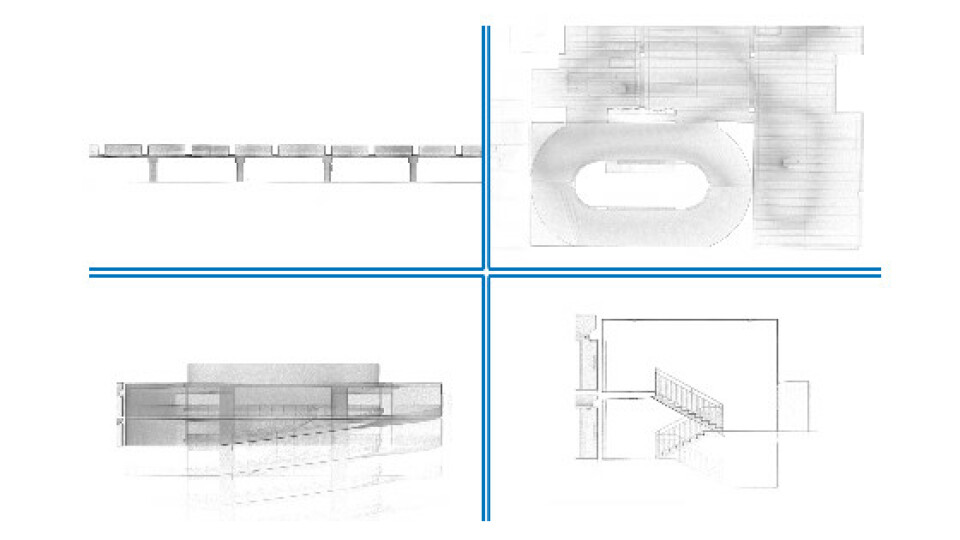
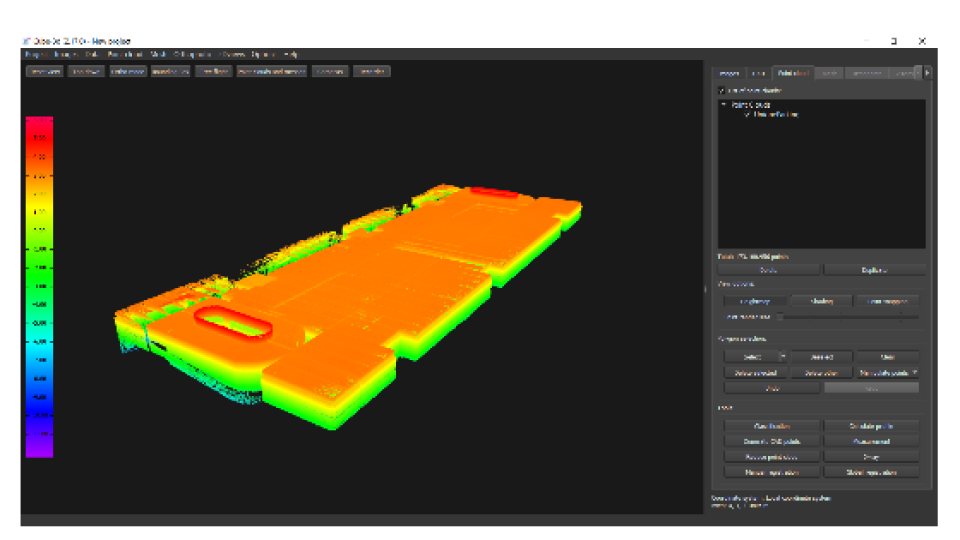
Image 3: Point cloud generated by Stonex X120GO
About Stonex
Headquartered on the outskirts of Milan, Italy, Stonex is one of the world's leading companies in measurement and survey, with over 80 qualified distributors worldwide.
Thanks to the integration of different positioning technologies and software, the wide range of solutions allows us to meet the needs of many fields of application and industries, such as building and construction, land survey, GIS and cadastral survey, 3D Scanning, Agriculture and smart farming.
Do you have questions about this article?
Get in touch with Stonex, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.

Related products







{kind=link}