
Monitoring Water Quality with Unmanned Surface Vehicles (USVs) in the Gulf of Mexico After Hurricane Harvey
As 13 trillion gallons of floodwater flowed into the Gulf of Mexico after Hurricane Harvey, researchers from Texas A&M’s Geochemical and Environmental Research Group (GERG) needed an efficient way to monitor water quality and understand the impacts to the ecosystem. And they needed to move quickly.
The Challenge
Hurricane Harvey made landfall in Texas on August 25, 2017. Following the devastating storm, an estimated 13 trillion gallons of floodwater flowed into the Gulf of Mexico. Researchers realized that this freshwater plume was potentially headed towards the Flower Garden Banks National Marine Sanctuary, 100 miles offshore of Galveston.
The coral reefs at Flower Garden Banks are acclimated to high salinities; the concern was that if the plume made it all the way out there, the inundation of freshwater could stress the corals and cause irreparable damage. Researchers needed an efficient way to monitor water quality and understand the impacts to the ecosystem. And they needed to move quickly.
The Approach
A rapid response was critical. Researchers from Texas A&M’s Geochemical and Environmental Research Group (GERG) recognized that using an unmanned surface vehicle would be an efficient way to collect and report real-time water quality data, and quickly partnered with Liquid Robotics to come up with a mission plan.
The idea was to use the Wave Glider as a lookout, positioning it ahead of the freshwater plume where it would act as an early warning system, if and when the freshwater plume passed through on the way to the Flower Garden Banks.
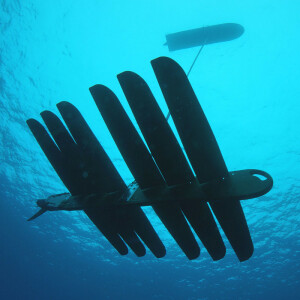
Time was of the essence with this mission, so the team partnered with Liquid Robotics for mobilization and piloting services. A Wave Glider, equipped with a weather station and hull-mounted CTD was deployed on September 8, 2017 from the RV Manta, a research vessel for the Flower Garden Banks National Marine Sanctuary. For the next 49 days, the Wave Glider collected salinity and temperature measurements every five minutes, reporting those back to shore every 30 minutes.
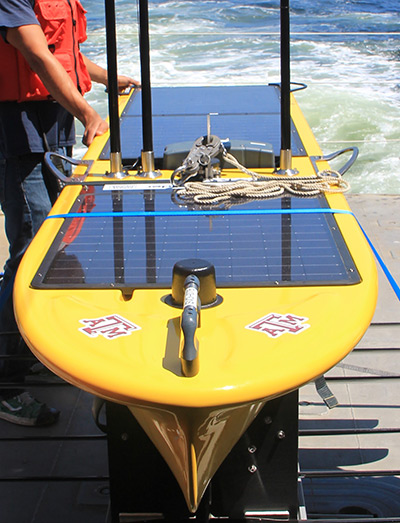
Texas A&M’s Wave Glider, en route to launch for its mission in the Gulf of Mexico.
The Results
Once the mission was underway, it became clear to researchers that the freshwater plume was heading in a direction away from the Flower Garden Banks, based on wind patterns. With the marine sanctuary spared, researchers took advantage of the Wave Glider’s flexibility and mobility and updated the mission plan. Pilots from Liquid Robotics re-tasked the Wave Glider to monitor the freshwater plume as it made its way down the Texas coast into Mexico. From the data collected during this part of the mission, researchers captured a lack of freshwater moving offshore.
While the Wave Glider traveled south and east, the Texas Automated Buoy Systems (TABS) buoys remained to the west, demonstrating how buoys and unmanned surface vehicles can work together to expand ocean observing capabilities.
“We purchased the Wave Glider for exactly this type of mission. With the rapid response from Liquid Robotics to help get the vehicle launched and piloted, we learned a great deal about the movement of the freshwater plume to complement our NSF-funded RAPID grant.”
— Dr. Anthony Knap, Director of the Geochemical and Environmental Research Group at Texas A&M University
What’s Next?
Dr. Steve DiMarco, GERG team leader for ocean observing and professor in the Texas A&M Department of Oceanography, plans to continue using unmanned systems to monitor the Flower Garden Banks marine sanctuary on an ongoing basis. He is looking to re-deploy the Wave Glider in the spring of 2018, timing the launch opportunistically with another research vessel heading out to the Gulf of Mexico.
“GERG’s long-range goal is to conduct a regular transect from ten miles off Galveston out to the Flower Garden Banks,” said DiMarco.
Related products









{kind=link}