





Drone Survey
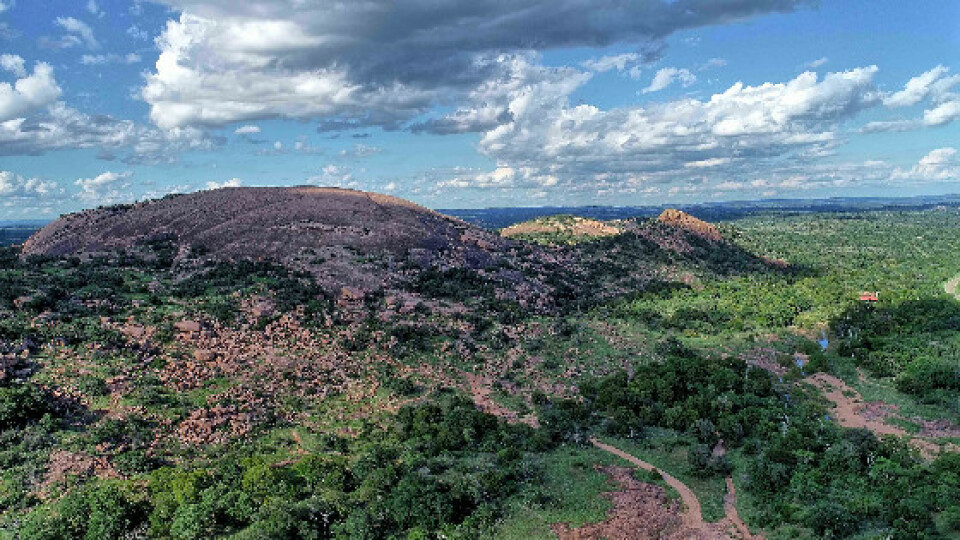
Sarah Alban walks us through best practice for UAV surveys that was used to produce an orthophoto mosaic and digital surface-elevation map of a flagship geological structure Enchanted Rock State Natural Area is a recreational site known for its flagship geological structure. The park in Texas, USA, is home to park rangers and a yearly field camp for University of Houston geophysics students. Both rangers and students rely on topographic data – historically, paper maps and Google Earth – for their fieldwork.

Originally published in 2019 in Geo:Connexion International.
You can also read an expanded version with more images here.
Enchanted journey
Sarah Alban walks us through best practice for UAV surveys that was used to produce an orthophoto mosaic and digital surface-elevation map of a flagship geological structure
Enchanted Rock State Natural Area is a recreational site known for its flagship geological structure. The park in Texas, USA, is home to park rangers and a yearly field camp for University of Houston geophysics students. Both rangers and students rely on topographic data – historically, paper maps and Google Earth – for their fieldwork.
In 2018, the university paired with Texas Parks and Wildlife Department to commission a UAV survey of the park that would yield new orthophoto mosaic data with 3D digital elevation models. The data and imagery would enable higher accuracy field exercises, research, education, and park planning and operations.
To perform the aerial survey, the university approached Michael Allison, owner and founder of Texas-based consultancy Raptor Aerial Services (RAS). Allison chose the DJI Inspire 2, his go-to mapping UAV, because of its size, lightweight design, ease of use, and 20-megapixel HD camera. “It’s one of the easiest to work with in the field,” he says.
The Inspire 2 uses two batteries simultaneously to power 25 minutes of flight and for the survey, Allison packed 20 batteries (four hours of flight), rugged Pelican cases for protection, and a backup UAV and iPad: “It’s always better to be prepared.”
Allison planned his survey using a combination of software. First, Google Earth let him define his 2.8km sq survey area, which he then exported to DroneDeploy to plan the mission. DroneDeploy generates flight lines based on adjustable variables including:
• Altitude. The higher the altitude at which the UAV flies, the lower the resolution of the imagery
• Speed. Allison prefers speeds between 24 and 32km/h, as the slower speeds lead to better quality imagery
• Front and side lap (how much the photographs will overlap). Allison set this to 75%
• Direction. Allison flew the UAV N45ºW.
“As you adjust these parameters in the software, you actually see changes in the flight lines,” he says.
For contouring and 3D modelling, Allison chose Global Mapper, an affordable, easy-to-use GIS that let him divide the total survey area into four zones that could be flown in three hours each.
Ground control
Allison uses two types of ground control points (GCPs) for areas with a lot of topographic relief and high altitude. The first type is a 90cm diameter, circular orange Hoodman USA target. It’s durable but lightweight and can be folded into a pouch. When unfolded, its rigid cable structure weighs it down. The centre has a plus sign and stencilled number that is easily identifiable from up to 120m above ground level (AGL).
The second GCP is a larger (1.2m x 1.2m), black-and-white vinyl target. It can be picked out more easily from higher altitudes, but needs to be anchored down in the field to avoid blowing away. Rocks will suffice for this.
To determine how many GCPs he’ll need and where to place them, Allison returns to Google Earth and places a minimum of one GCP at each zone’s corners and centre.
“There is a minimum of five GCPs in any survey,” he says. “But it really depends on the size of the area and how much the elevation changes within that area.” The more relief there is, the more GCPs he adds, through judgement and experience. “There is no magic formula. Believe me, I have looked for this stuff!”
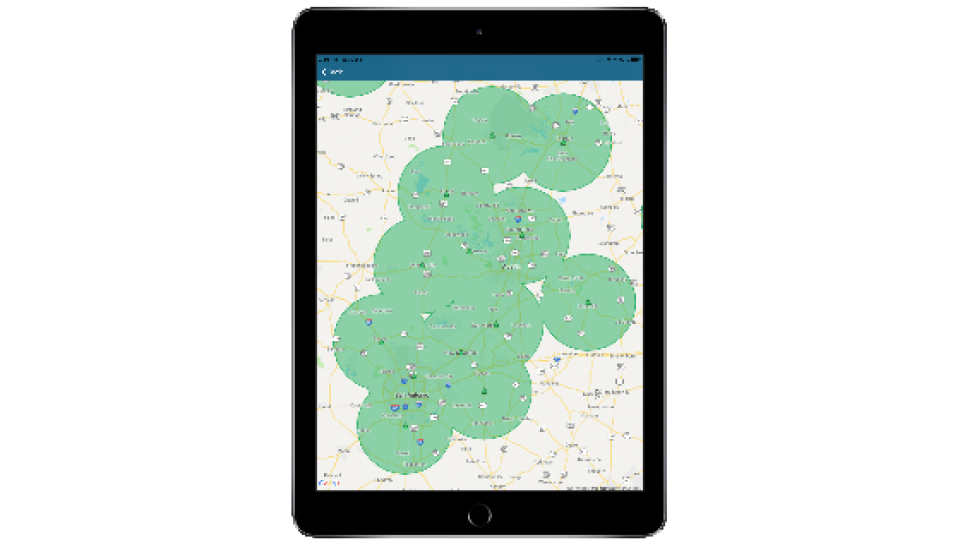
Allison placed 20 GCPs in Google Earth for Enchanted Rock. He then exported his data into mobile iOS app GPS Tracks. This showed him where to drive to place his GCPs.
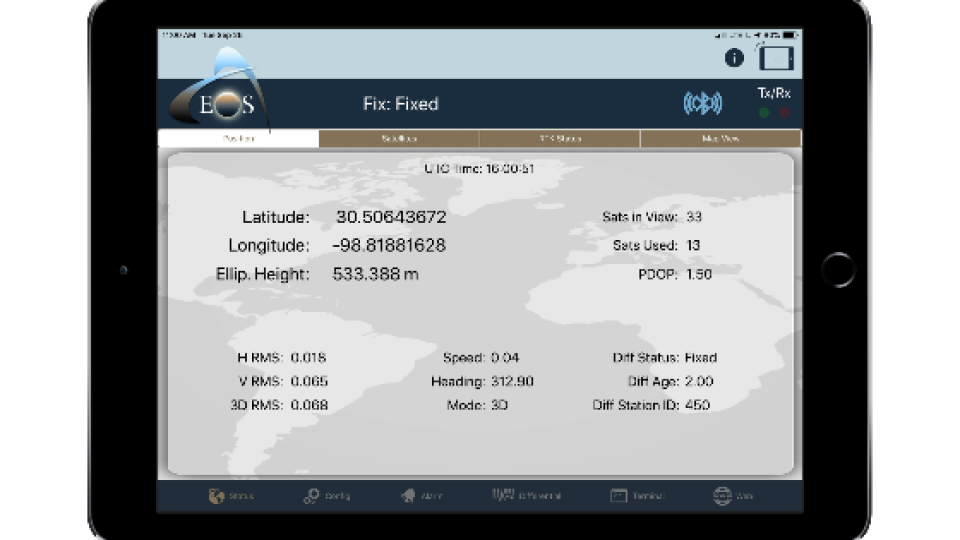
After laying out each one, Allison surveyed the area’s centre with an Arrow Gold GNSS receiver made by Eos Positioning Systems. Allison chose the Arrow Goldbecause of its ease of use and ruggedness.
“The thing I enjoy about the Arrow Gold is that it’s easy to assemble and get going in the field,” Allison says. “And it works really well.”
For real-time kinematic (RTK) corrections, the Arrow Gold connected to the TopNETLive RTK network, to which Allison subscribes. He took then screenshots of Eos Tools Pro on his iPad to capture the GCP coordinates.
“It’s a pretty efficient process,” he says. “I just hook up to the iPad, make sure Eos Tools Pro is up to date, and I know I’m going to get a good location because the product works so well.”
With the GCPs placed and surveyed, Allison was ready to fly.
Flying Enchanted Rock
Over the course of about three hours, Allison flew his UAV within the 800m line of sight required by the US Federal Aviation Association. After two days of such flights, he uploaded his data to SimActive’s processing software Correlator3D.
“Correlator3D is well designed, so it’s intuitive to process UAV imagery,” he says.
Allison tagged each GCP centre and allowed the processing software to geo-reference the images.
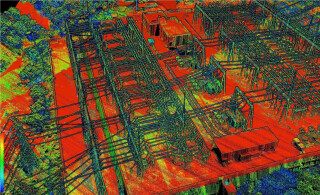
“The results of Correlator3D were outstanding,” he says. “The image resolution was quite nice and the weather was just beautiful. It was just ideal to shoot a UAV aerial survey.”
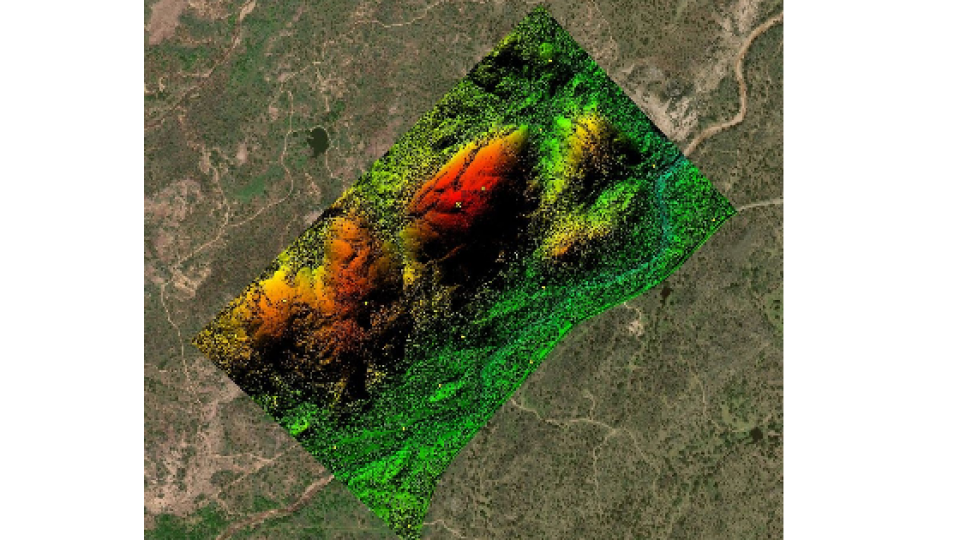
RAS provided the park and university a survey-grade orthophoto mosaic, digital surface-elevation map with three contour levels (1.5m, 3m, 6m), a 3D model and shapefiles.
The park will use the new data for education, research and park monitoring. For instance, they might compare the new orthophoto mosaic to older maps to see if any rock formations or trails have changed. They will also use the data for onboarding, search and rescue and more. The University of Houston’s geophysics department can access the data for its annual field camp, too.
“You can do an awful lot with this data,” Allison says.
Sarah Alban is a senior marketing and content strategist at Eos Positioning Systems (eos-gnss.com)
GNSS
RTK
GPS
ground control points
drone survey
UAVs
DJI
digital elevation model
3D topographic map
orthophoto
Arrow Gold
GCPs
Do you have questions about this case study?
Get in touch with Eos Positioning Systems, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.
Related products

![3月21日-封面[1].jpg](https://cdn.geo-matching.com/voeE1ywo.jpg?w=320&s=6b3b1a0215d770f8797653e9202a8f52)





{kind=link}