

Creating an Autonomous Marine Survey Vehicle to Find River Crossing Points
A competition was launched by the UK’s Defence Science and Technology Laboratory (DSTL) in an effort to develop an autonomous survey vehicle that could survey rivers and river banks to find sites for troops to cross. Ultrabeam met the challenge.
Ultrabeam Hydrographic was awarded one of five contracts by the Ministry of Defence, Defence and Security Accelerator (DASA) to develop a remotely operated reconnaissance survey system to help troops safely and stealthily advance into enemy territory across water obstacles such as rivers.
Challenge of the Survey
When advancing into enemy territory, the UK military needs to be able to cross obstacles, such as rivers. Currently, the only way to identify suitable crossing points is to send Royal Engineer reconnaissance troops to survey both river banks. This exposes them to danger at the battlefield and risks compromising the location by signalling interest in it.
The goal is to remove personnel from this potentially dangerous and compromising task using a semi-autonomous remote system that can take measurements without needing personnel at the location. Currently, some sensors can take the needed measurements and various delivery platforms; however, there is no combined system to gather all the required data.

An Autonomous Marine Survey Vehicle Is the Solution
Five small and medium-sized businesses were awarded Phase 1 funding (£177,789) by the Defence and Security Accelerator (DASA) to fast-track their innovative solutions and test with the British Army. Ultrabeam Hydrographic was one of the companies awarded the contract to demonstrate an amphibious, autonomous hydrographic survey vehicle using novel techniques, and tools and Sonar and Lidar (Light Detection and Ranging).
To design the perfect solution, Ultrabeam selected Applanix.
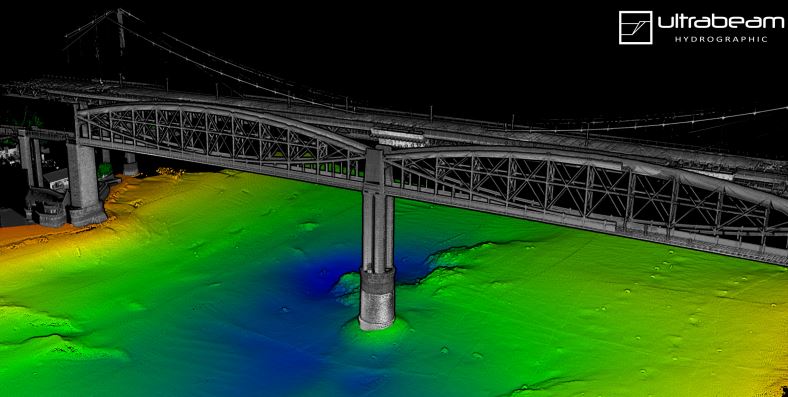
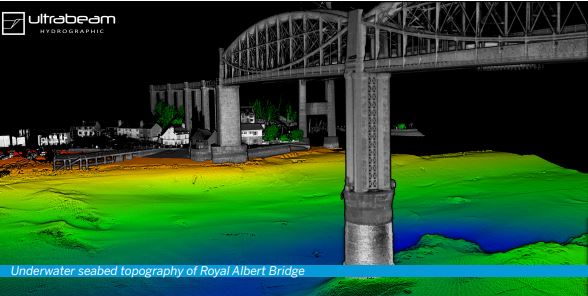
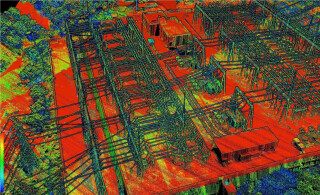
Ultrabeam created a rugged eight-wheeled, unmanned vehicle that is three metres long, fully amphibious and boasts electric thrusters for advanced water manoeuvrability. The vehicle has an ultra-high resolution 360-degree coverage Scanner, a Norbit Multibeam system, and the Applanix POS MV OceanMaster system (Position and Orientation System for Marine Vessels) for directly georeferencing the data collected. This data could then be used to create high-accuracy maps of the terrain, both above and below the waterline.
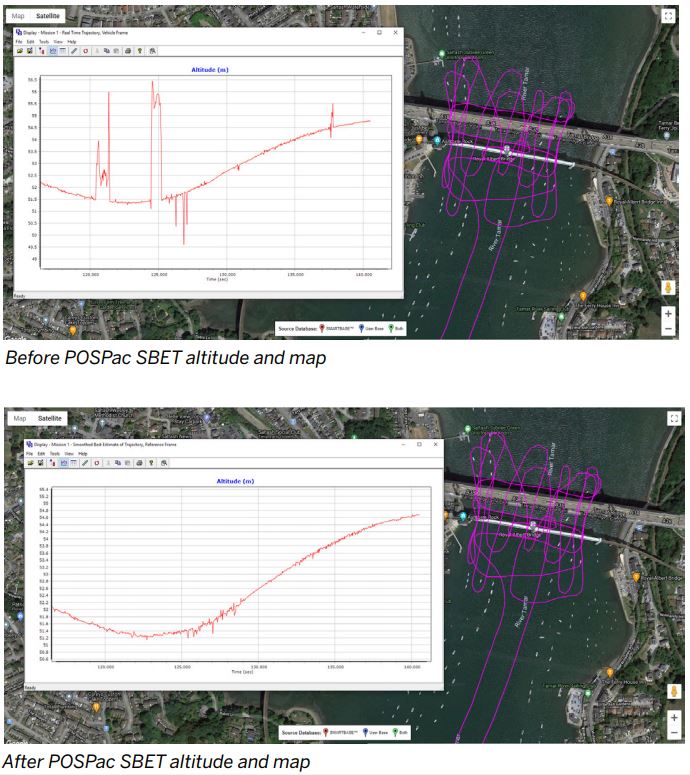
“All of our high-accuracy surveys use POSPac to post-process the POS MV files to provide the highest accuracy solution possible. We deploy a Trimble base station as close to the site as possible and log base data at 1Hz. We then use this base station to post-process the POS data to produce the SBET for import into our survey processing software QPS Qimera,” says Gabriel Walton. The vehicle also has a portable control station, mobile command centre and real-time 3D navigation and data display.
“POSPac greatly improves the navigation solution allowing us to increase our accuracy. We perform bridge surveys and close passes to the high quay and port walls which reduces our view of the satellites. Errors are often visible in the real-time solution, but once POSPac’d, we improve the final solution,” - Gabriel Walton, Technical Director at Ultrabeam.
Ultrabeam will be participating in phase 2 of Map the Gap and will use this as part of its fleet moving forward.
Autonomous Marine Survey Vehicle Specifications
The vehicle’s autopilot capabilities:
- auto heading
- route following
- position hold
- auto speed
- strafe movements
Weight: 450 kg
Length: 3.0 m
Width: 1.45 m
Height: 1.8 m
Load: 100 kg On land
Vehicle performance:
- 8 mph vehicle speed at 3000RPM
- motors capable of 6000RPM to give 16mph
- 8x8 wheel drive with high torque motors and gearbox
- maximum incline over 45 degrees
- gearboxes can be adjusted to give a higher top speed
Vehicle performance on water:
- 4mph water speed
- 8hp equivalent bow thruster allows perfect heading control and the ability to perform strafe movements
- shallow draft
- 48V Torqeedo Cruise 4.0 8hp equivalent thrusters giving a total of 16hp forward thrust
Endurance
- 48V 21.2kWh Tesla batteries
- over 12-hour endurance
- estimated range of 20-60 miles depending on terrain and speed
- charging time from 10% to 90% is 2 hours
Telemetry and Control Range
- main control telemetry range 10km direct LOS
- low-resolution camera and data acquisition available in this range
- high-resolution camera transmitter range is 500m
- Dynautics autopilot is capable of following a route or programmed commands beyond the telemetry range
POS MC OceanMaster Accuracy and Performance Summary
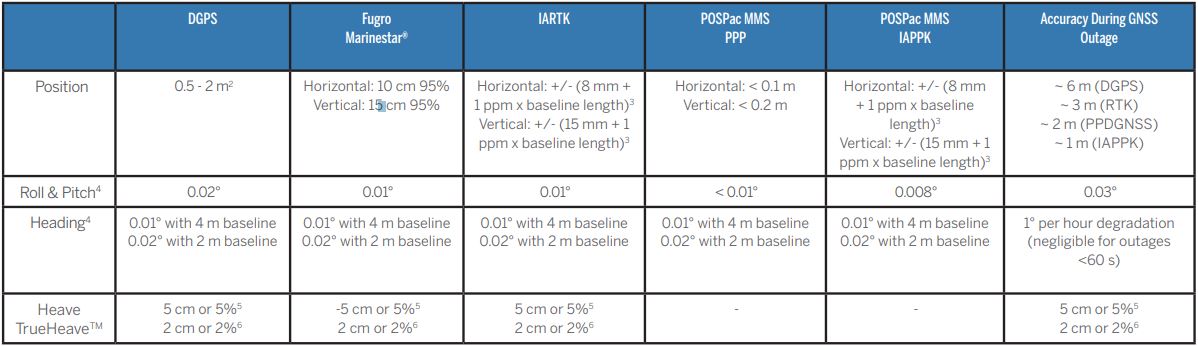
“We needed to produce very high-accuracy data for this project. And that’s why we chose Applanix. The Applanix POS MV and POSPac post-processing software produce the very best results in the industry.” - Gabriel Walton, Technical Director at Ultrabeam.
Do you have questions about this case study?
Get in touch with Trimble Applanix, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.




![3月21日-封面[1].jpg](https://cdn.geo-matching.com/voeE1ywo.jpg?w=320&s=6b3b1a0215d770f8797653e9202a8f52)





{kind=link}