

Artificial Intelligence Helps Revolutionize Inertial Navigation
Since its first inception in the 1960s, the Kalman filter has been commonly used to this day for guidance and navigation applications. It has undergone many adjustments designed to improve upon the basic implementation, such as the Extended KF or Unscented KF. In recent years, however, a new approach to filtering based on Artificial Intelligence Neural Network (ANN) processing has made significant breakthroughs that have pushed the inertial navigation industry into a new era.
Until recently, little has been concretely achieved in the space of Artificial Intelligence for inertial navigation applications until Advanced Navigation entered that space in 2012, commercialising a fusion neural network out of a university thesis.
The stakes have been raised even higher with the widespread use of GNSS jamming and spoofing technologies, forcing Defence Forces to move away from GNSS-only solutions for position information and instead rapidly adopt Inertial Navigation Systems (INS) solutions that require greater precision and better dead-reckoning performance.
Artificial Neural Network (ANN), How Does it Work?
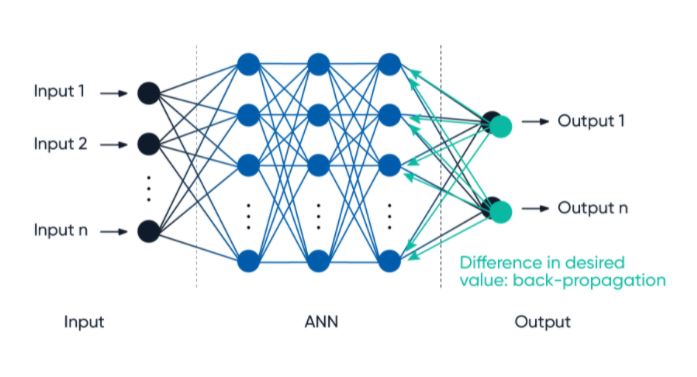
At its core, an Artificial Neural Network has self-learning capabilities that enable it to turn inputs from various sensors into better-resulting outputs as more data become available over time.
More precisely, a typical ANN goes through two distinct phases.
- During the initial phase, processing units making up the ANN are “taught” a set of learning rules used to guide its outcome, recognizing patterns in data by comparing its actual output with the desired output.
- During the second phase, corrections (called back-propagation) are applied to the data to achieve the desired output.
Advanced Navigation’s solution relies on the Long/Short term Memory (or LSTM) AI principle, well-suited to classifying, processing and making predictions based on sensor data with a variable duration between important events.
As LSTM operates over a long time span, thus it is relatively insensitive to gap length as an advantage over the hidden Markov model generally associated with Kalman filters.
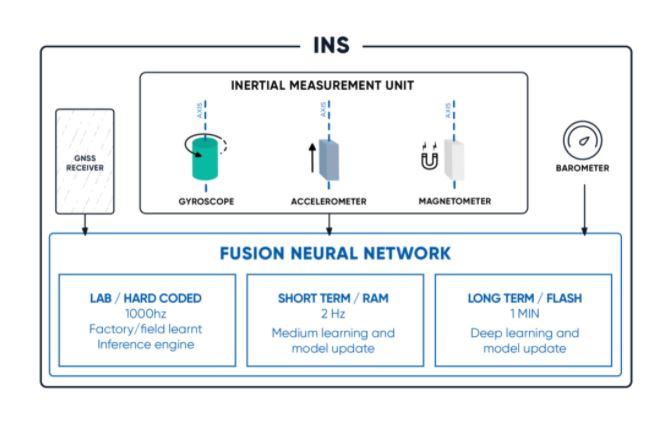
Advanced Navigation’s ANN relies on three types of memory:
- In the lab, long-term learning is hard coded in the inference engine, thanks to many hours of testing in various environments.
- Short-term learning operates to update the model in the inference engine twice every second. This learning is more constrained and offers a ‘medium’ level of learning.
- A once-per-minute deep learning operates across all sensor data to self-model the system to make the most complex updates to the learnt model.
Artificial Neural Network (ANN) Compared to Traditional Filtering
Common errors addressed during processing are of two kinds:
- Deterministic errors (biases, scale-factor errors, and non-orthogonal errors)
- Stochastic errors (instabilities and noises)
The factory temperature calibration can account for the majority of sensor errors. However, live sensor error estimation is required to account for the remaining error and is critical to the system's accuracy.
With quite a number of sensor inputs going into any INS, it is expected that a reasonable amount of filtering, computation and integration is required to continuously determine the current position and velocity.
Traditional filters face limitations in correcting those errors, opening the door for ANN solutions to fill the gap.
Traditional extended Kalman filters track sensor errors with a delay based on slow filter updates. The advantage of the ANN filter is that the sensor error tracking is faster and significantly more accurate due to its use of all the data available.
Firstly, the ANN filter features integrity monitoring far superior to traditional filters, allowing it to reject erroneous measurements and adjust accuracies for inconsistent data at a much deeper level. This gives the system far greater performance in difficult conditions where erroneous data is fed into the system. The performance increase is especially noticeable in high multipath GNSS environments such as urban canyons or near walls.
Secondly, with traditional Kalman filter-based systems, vehicle profiles apply basic constraints on position, velocity & acceleration across various sensor inputs, resulting in modelling of vehicle motion. By contrast, when using ANN, the vehicle profile applies far more thorough dynamic motion model constraints, allowing for better tracking of errors, more reliable data and higher accuracy.
The Advantage of Advanced Navigation
In practice, developing a highly constrained AI fusion neural network model is not as straightforward as one might think.
It has only been achieved through a rigorous process and many years of lab and field research, starting back in 2007 at the university, to develop a highly constrained custom neural network, establish training patterns and build a large collection of data.
Had the AI model not been as constrained through its custom neural network design approach, it would lead to unpredictable results and required a higher level of processing. In fact, it may potentially not provide any net benefit over traditional KF methods.
As a result of implementing such a highly constrained AI learning model, it is possible to develop our INS offerings on high-end microprocessors, which operate at relatively low power.
Furthermore, all Advanced Navigation IMU and INS products operate at high internal filter rates of 1000 Hz to offer high dynamic performance in the most demanding applications.
All these breakthrough innovations result in solutions packaged in a market competitive size, weight and power.
Field Test
Advanced Navigation’s ANN filter has been tested comparing a Spatial FOG with a GNSS based reference system over an 8 hour and 17 minutes trip in New South Wales, Australia, covering a distance of 558 kilometres and with an 800 m elevation change.
As you can see below, the GNSS-based reference system in RED and the Spatial FOG system in Blue arrived very close to one another. In fact, the total error only represents a mere 0.1% of the distance travelled.

The Future is Promising
Artificial Neural Network allows a new approach to existing inertial navigation applications and specifications, lowering SWaP-C at each performance level.
Furthermore, such capabilities combined with the miniaturisation of MEMS technology with ever-increasing performance will allow new applications to rise and reduce susceptibility to GNSS jamming and spoofing across industries.
Do you have questions about this case study?
Get in touch with Advanced Navigation, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.








{kind=link}