
A Fleet of AUVs for Seismic Surveys
The ongoing WiMUST (Widely scalable Mobile Underwater Sonar Technology) project aims to design and test a system of cooperating autonomous underwater vehicles (AUVs) that would simplify seismic surveying and offer significant advantages over modern streamer-towing operations.
Seismic surveys are a crucial part of offshore exploration, producing detailed imagery of sub-bottom rock formations that enables the location and evaluation of oil and gas deposits. Other commercial, scientific and military uses include assessments of the seabed for offshore construction, installations of renewable energy infrastructure, academic studies of the geology, civil engineering projects in shallow coastal zones, etc.
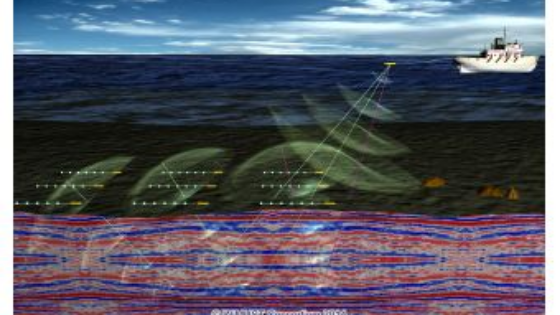
Traditionally, seismic acoustic surveys are performed with a vessel that tows a powerful acoustic source (an airgun array) and one or multiple streamers - an array of hydrophones on a system of long cables. Acoustic waves from the source bounce off the sub-bottom structures and travel back to the sea surface, where the reflections are captured by the hydrophones. Post-processing of the acquired sound propagation data reveals the details about the structures beneath the seafloor.
Objectives of the survey and the subsurface complexity in the target area define the particular configuration of the data-acquisition solution. Developed over the past 50 years, contemporary methods range from 2D surveys with single-vessel narrow-azimuth passes to sophisticated wide-azimuth multi-vessel 3D surveys, and the choice of a particular survey scenario is based on balancing the required image quality with available time and cost resources while minimising risks.
Modern Seismic Surveys: The Scale
As modern technology allows the capture and processing of bigger and bigger data volumes, a large 3D survey would, for example, involve a specialised vessel that tows up to 10 parallel streamers 4 to12km in length, each containing over 300 receivers paired with accelerometers, depth and other sensors. With 17.6 square kilometres covered by its spread, one such system is, in fact, the largest man-made moving structure on Earth.
Towing such a large object may yield faster production rates, but obviously comes at a cost. Even manoeuvring a big streamer array requires significant space and time - a 10 km streamer might require up to 8 hours to turn.
While being extraordinarily well engineered solutions, the streamers present limitations that need to be overcome in order to further improve seismic acquisition quality and efficiency.
Overall, seismic surveys are highly complex operations - and increasing demand drives exploration into more and more challenging environments that require extremely sophisticated approaches. For example, ‘looking under the edges’ of acoustically opaque structures like salt domes or dense basalts might require a costly multi-vessel survey with additional source and/or streamer-towing ships (Gisiner, 2016).
Large streamer spreads are subjected to lateral drift (so-called feathering) that requires efforts to mitigate, and are exposed to significant forces that lead to risky deployment and recovery. Other setbacks include swell and turbulent flow noise that affects seismic data, inflexible source-receiver geometry, inability to operate in obstructed areas, and extensive barnacle fouling in certain areas.
Modern industry tends toward longer streamers, higher streamer counts, tighter streamer spacing. But towing such a large recording system may not be the ultimate solution in terms of the ratio of data quality to cost. Is bigger necessarily better?
WiMUST Project: The Concept
The EU-funded WiMUST project aims to fundamentally improve existing methods for geophysical acoustic surveys by ‘cutting the cable’ and decoupling the acoustic source from the system of receivers. The main novelty of the WiMUST system is using marine robots to capture seismic data instead of conventional streamers.
Discarding complex kilometre-scale structures, the 9 project collaborators advance an innovative concept where short streamers of small aperture are towed by autonomous underwater vehicles (AUVs) that work together in a cooperative formation.
The AUVs act as sensing and communication nodes of a reconfigurable mobile acoustic network, and the whole system behaves as a distributed sensor array for recording data, obtained by illuminating the seabed and the sub-bottom with strong acoustic waves from a source(s) installed on-board a support vessel (Figure 1).
Project Partners
The 36-month WiMUST initiative started on 1 February 2015 and brings together a group of research institutions, geophysical surveying companies and SMEs with expertise in autonomous systems, marine robotics, communication, navigation and cooperative control.
The four academic partners are:
- the Interuniversity Centre on Integrated Systems for the Marine Environment - ISME (Project coordinator) - Italy
- Instituto Superior Tecnico - IST - Portugal
- Centre for Technological Research of the Algarve - CINTAL - Portugal
- University of Hertfordshire - United Kingdom
The five industrial partners are:
- EvoLogics GmbH - Germany
- Graal Tech S.r.l. - Italy
- CGG - France
- Geo Marine Survey Systems B.V. - The Netherlands
- GeoSurveys - Consultores em Geofısica, Lda. - Portugal
Do you have questions about this case study?
Get in touch with EvoLogics, and they would be happy to answer any questions you have about pricing, suitability, availability, specs, etc.







{kind=link}