

Sabertooth Double Hull
The intelligent transformative robotic system.
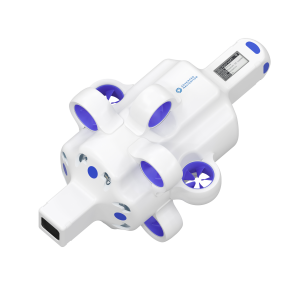
The Sabertooth is a hybrid AUV/ROV capable of working in deep water either as an autonomous vehicle or via a tether. Its power, tether-free operation and its 360° hovering manoeuvrability make the Sabertooth an ideal option for autonomous inspection or maintenance and repair tasks as well as offshore survey work.
Saab Seaeye
Fareham, GB
Description
The Sabertooth is a hybrid AUV/ROV capable of working in deep water either as an autonomous vehicle or via a tether. Its power, tether-free operation and its 360° hovering manoeuvrability make the Sabertooth an ideal option for autonomous inspection or maintenance and repair tasks as well as offshore survey work.
The Sabertooth is available as a single hull or double hull vehicle capable of operating at depths of 1200m or up to 3000m for the double hull vehicle.
The double hull Sabertooth can be based at a remote location docking station ready to be launched on pre-programmed or man-controlled missions, including inspection, repair and maintenance, research tasks and environmental monitoring. Tooling packages can be stored at the docking station, batteries recharged and data transferred via satellite or cable to shore.
The vehicle can reside in the docking station for more than six months without maintenance, reducing the cost of surface vessels.
Specifications
-
Operations
-
Max. speed [kn]
5
-
General
-
Length [m]
3.7
Width [m]
1.4
Height [m]
0.45
Min. weight of AUV in air [kg]
850
Max. Weight of AUV in air [kg]
1050
Portable
Y
Crane required
Y
Maximum payload [kg]
120
Maximum depth rating [m]
3000
Number of thrusters
6
Thruster specifications
SM9
Hovering capabilities
Intrinsic
Propulsion or glider
-
Telemetry and Control
-
Acoustic telemetry
Y
Max. Baud rate of ethernet connection [Mb/s]
1000
Data sent to the surface
Depending on available bandwith
Control parameters sent to the AUV
Depending on available bandwith
Emergency recovery procedure
Vehicle boyant;independent GPS and SAT-COM; recovery from surface.
-
Navigation and Payload
-
Navigation sensors - standard
IMU/Doppler
Navigation sensors - optional
Botom Navigation; Sonar reflectors
Payload sensors - standard
1 camera on tilt-platform
Payload sensors - optional
Electronically scanning imaging and obstical avaidance sonar
-
Battery
-
Total energy content [Wh]
20000
Endurance at nominal power [hr]
>14
Battery swap
Y
-
More information
-
Applications
Operates autonomously or semi-autonomously; tetherless or tethered; in resident or non-resident mode. In resident mode can remain at remote station for 6 months+; to be launched on task as needed. Tunnel inspection with +20km disposable F/O fibre.
Commercial Options
Hovering Hybrid AUV/ROV for light work; inspection and maintenance
Distinguishable features
Being a hybrid AUV/ROV it can accommodate tooling for light work activities.







{kind=link}