

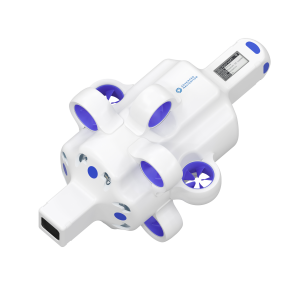
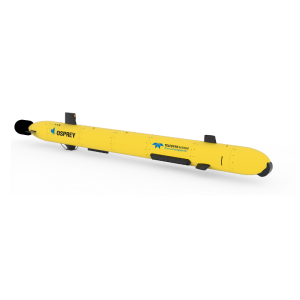
LAUV
OceanScan - Marine Systems & Technology Lda
Leca Palmeira, PT
Description
Specifications
-
Operations
-
Min. turning radius [m]
4
Launch and Recovery System
one person hand launch/recovery from shore or a small boat
Max. speed [kn]
4
Min. crew size
1
Min. required number of surface computers
1
Required size of storage room
system stored in a rugged case with 1.3x0.4x0.6m
Other requirements
optional gateway and rugged laptop computer
-
General
-
Length [m]
1.2
Width [m]
0.15
Height [m]
0.15
Min. weight of AUV in air [kg]
15
Max. Weight of AUV in air [kg]
22
Portable
Y
Crane required
N
Maximum payload [kg]
7
Maximum depth rating [m]
100
Number of thrusters
1
Thruster specifications
Brushless thruster and 4 independent control fins
Hovering capabilities
Optional
Propulsion or glider
-
Telemetry and Control
-
Acoustic telemetry
Y
Acoustic baud rate [bit/s]
13900
Radio telemetry
Y
Radio baud rate [bit/s]
8388608
Max. Baud rate of ethernet connection [Mb/s]
100
Data sent to the surface
Vehicle status and position;
Control parameters sent to the AUV
New mission trigger (from an on-board mission database); Safe Action Trigger; Mission Abort Request;
Emergency recovery procedure
Acoustic Modem, Iridium and GSM messages; Independent Acoustic Marker (pinger); Vehicle is positively buoyant;
-
Navigation and Payload
-
Navigation sensors - standard
GPS; AHRS;
Navigation sensors - optional
DVL; INS; LBL;
Payload sensors - standard
Depth Sensor; GSM/HSDPA Module; Wi-Fi Module; System Status Sensors;
Payload sensors - optional
Side-Scan Sonar (single or dual frequency); Multibeam Sonar; Acoustic Communications; Forward Looking Sonar; CTD; SVS; Turbidity; Fluorometer; Dissolved Oxygen; Digital Camera+LEDs; Communications Gateway (GSM + Wi-Fi + GPS + Acoustic Modem);
-
Battery
-
Total energy content [Wh]
728
Nominal battery power [W]
364
Endurance at nominal power [hr]
8
Battery swap
N
Recharge time from empty [hr]
6
-
More information
-
Applications
Underwater Surveillance; Mine Counter Measures (MCM); Rapid Environmental Assessment (REA); Anti Submarine Warfare (ASW) Training; Search and Recovery (SAR); Port Security; Scientific Research; Environmental Surveys; 3D CTD Mapping; Emergency Response Surveys; Development Platform for Underwater Robotics; AUV Training Platform; Hydrographic Surveys; Wreck Search and Mapping; Pre/Post Dredging Monitoring; Underwater Archeology; Bottom Mapping;
Commercial Options
The LAUV can be configured according to the costumer needs. The system is operated with NEPTUS (Command and Control User Interface), there is no need to use third party software to review collected data. Multi-vehicle operations are also supported.
Distinguishable features
The LAUV is a Lightweight AUV targeted at innovative standalone or networked operations for cost-effective oceanographic, hydrographic and security and surveillance surveys. NEPTUS is the LAUV Command and Control User Interface. As a complete software framework was designed to support all user’s actions in all stages of the mission life cycle: plan and design, simulation, execution, monitoring and data analysis.




{kind=link}