
Description
Specifications
-
Operations
-
Min. turning radius [m]
0
Launch and Recovery System
A-frame; Winch; RHIB; Crane; Ramp
Max. speed [kn]
2
Min. crew size
2
Min. required number of surface computers
1
Other requirements
Bluefin Operator Tool Suite (software); Training Course
-
General
-
Length [m]
0.107
Width [m]
1
Height [m]
0.41
Min. weight of AUV in air [kg]
79
Maximum depth rating [m]
60
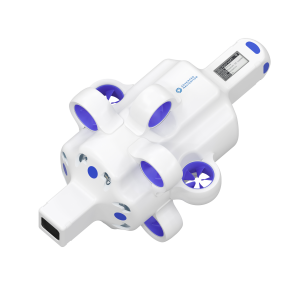
Number of thrusters
6
Propulsion or glider
-
Telemetry and Control
-
Radio telemetry
Y
Max. Baud rate of ethernet connection [Mb/s]
100
Data sent to the surface
Full Health; Status
Control parameters sent to the AUV
Mission Stop; Switch to/from manual mode
Emergency recovery procedure
Acoustic locator and Radio direction finder
-
Navigation and Payload
-
Navigation sensors - standard
Inertial Measurement Unit; DVL and depth sensor
Payload sensors - standard
Imaging Sonar
Payload sensors - optional
Micro-bathymetry Profiling Sonar; Dual Frequency Imaging Sonar; Camera
-
Battery
-
Total energy content [Wh]
1500
Nominal battery power [W]
430
Endurance at nominal power [hr]
3.5
Battery swap
Y
Recharge time from empty [hr]
6
-
More information
-
Applications
Ship Hull; Infrastructure Inspection; Port & Harbor Security; Mine Countermeasures (MCM); Unexploded Ordnance (UXO); Scientific Research
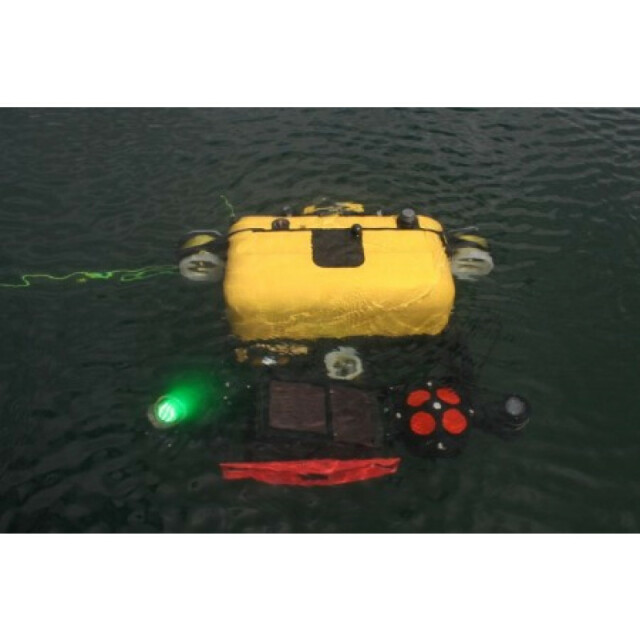
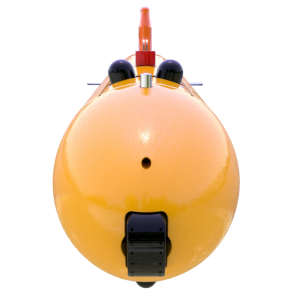
Distinguishable features
A hovering AUV for autonomous ship hull and infrastructure inspection




{kind=link}