










Description
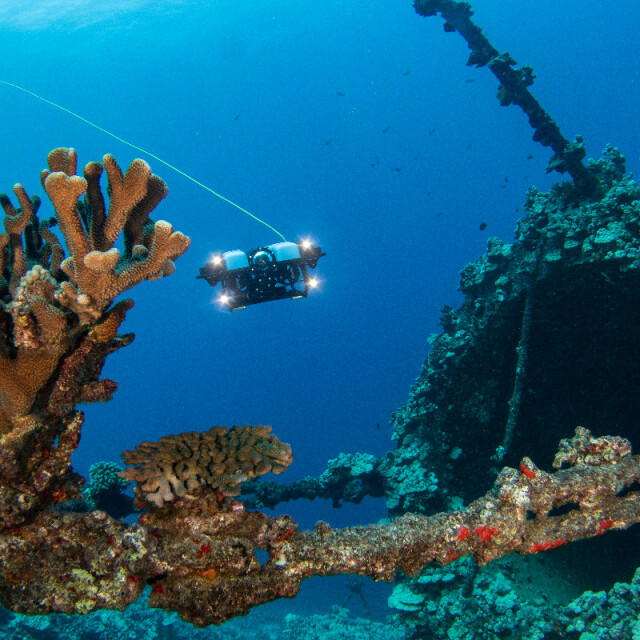
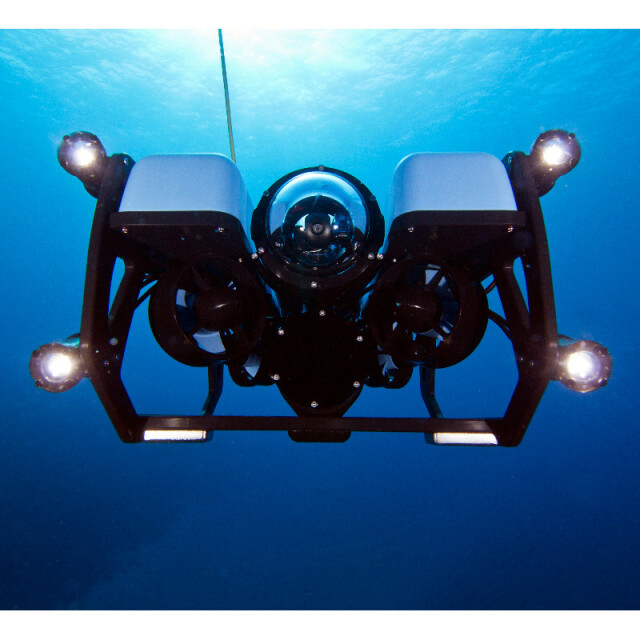
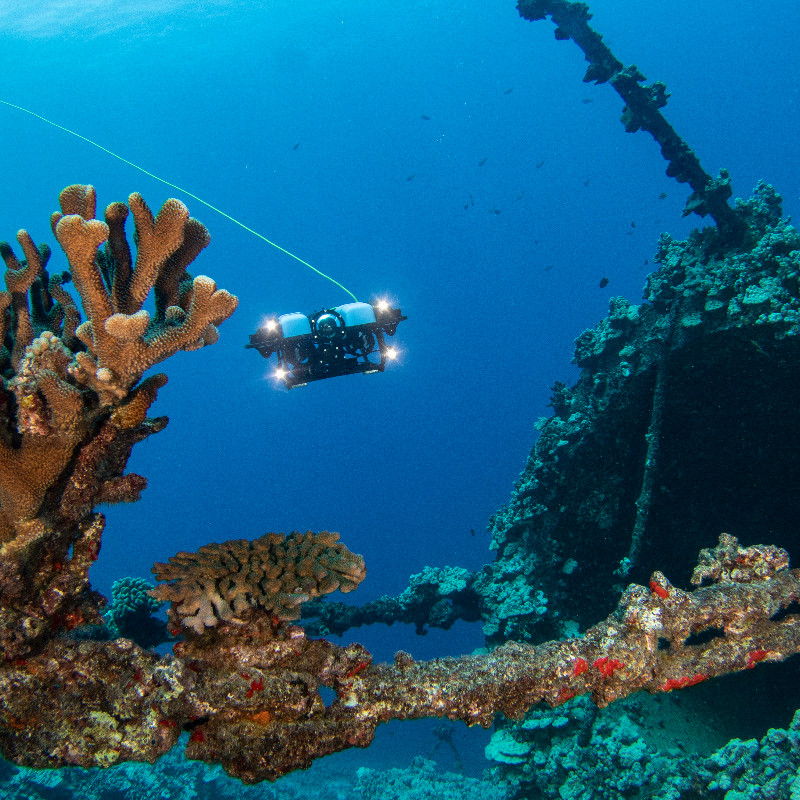
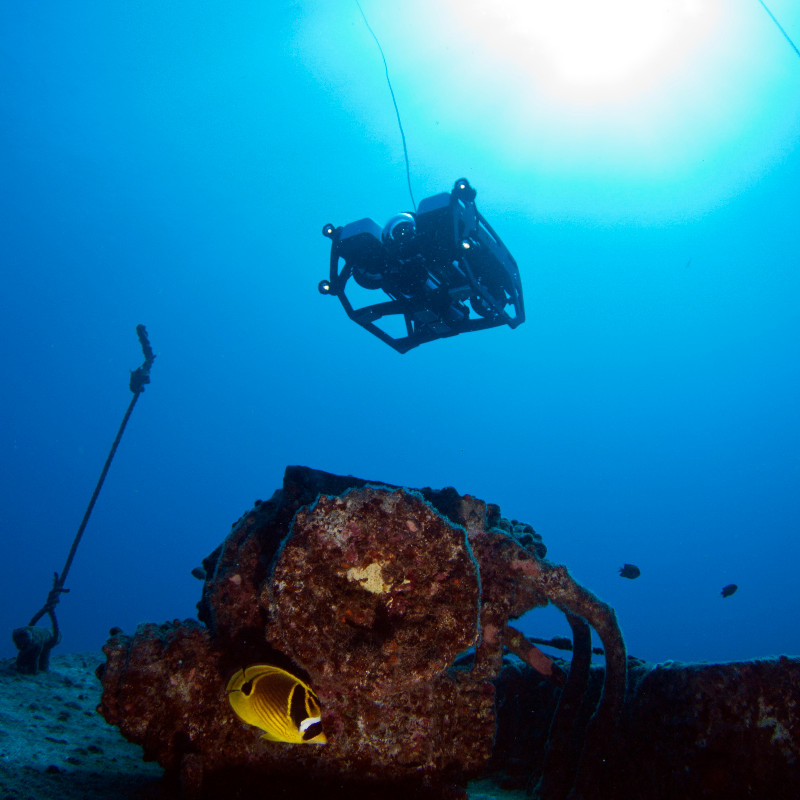
With a 6-thruster vectored configuration, open-source electronics and software, and plenty of expandability, the Blue Robotics BlueROV2 is perfect for inspections, research, and adventuring. What will you see?
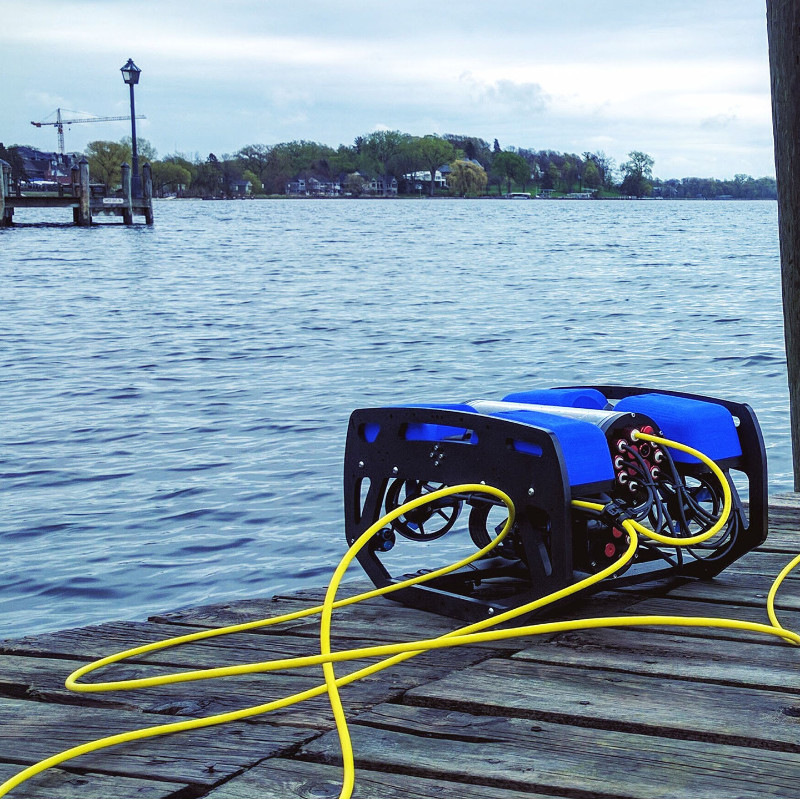
The BlueROV2 comes partially assembled and requires 6-8 hours of user assembly to complete. During the assembly process, you learn how all of the components of the system work and fit together and it leaves you with the knowledge needed to make upgrades and improvements in the future!
Key Features:
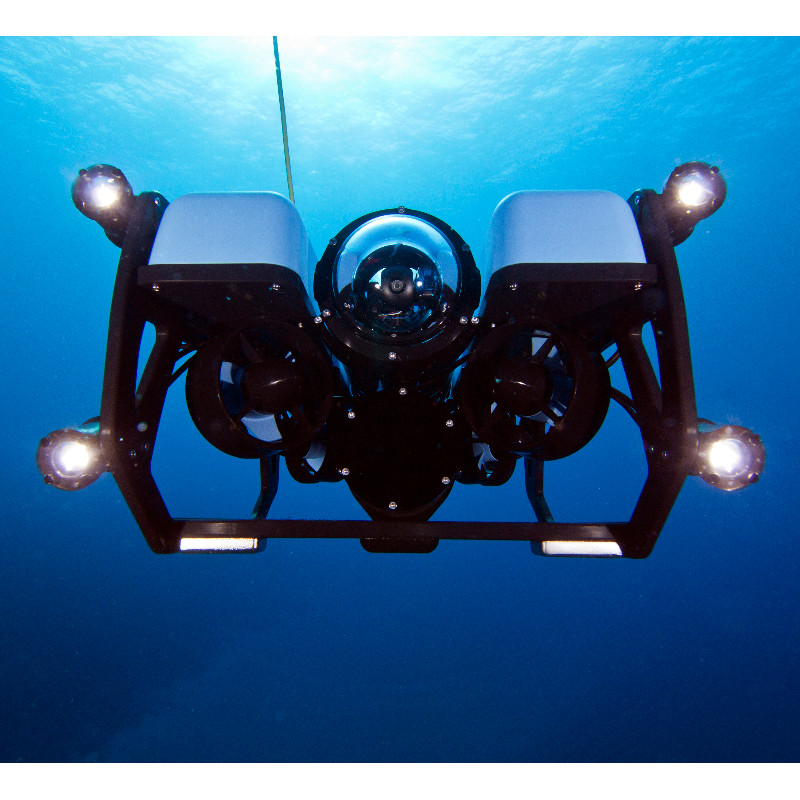
• Live HD Camera and Lighting – 1080p, 30 fps wide-angle low-light camera optimised for use on the ROV
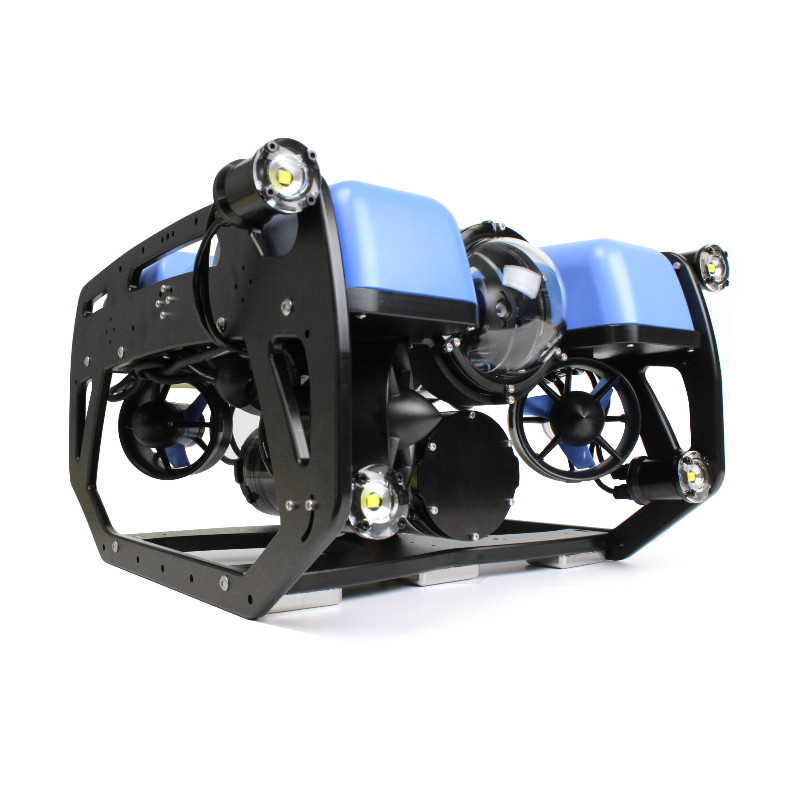
• T200 Vectored Thruster Configuration – Six thrusters providing a high thrust-to-weight ratio and precise movement
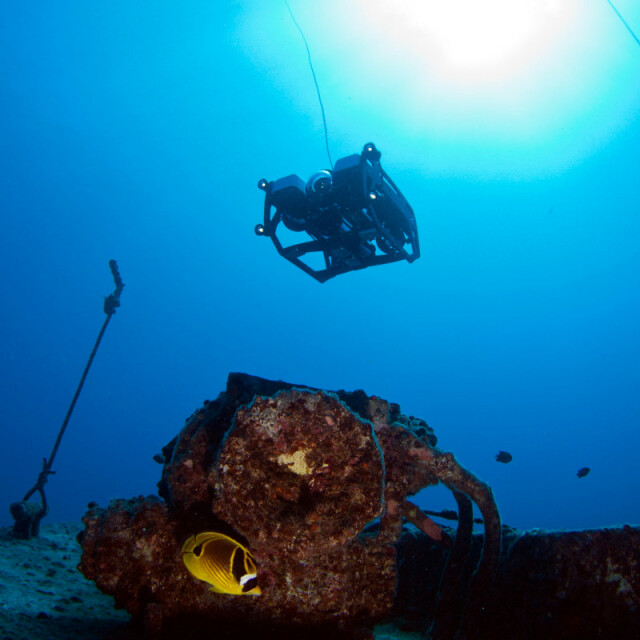
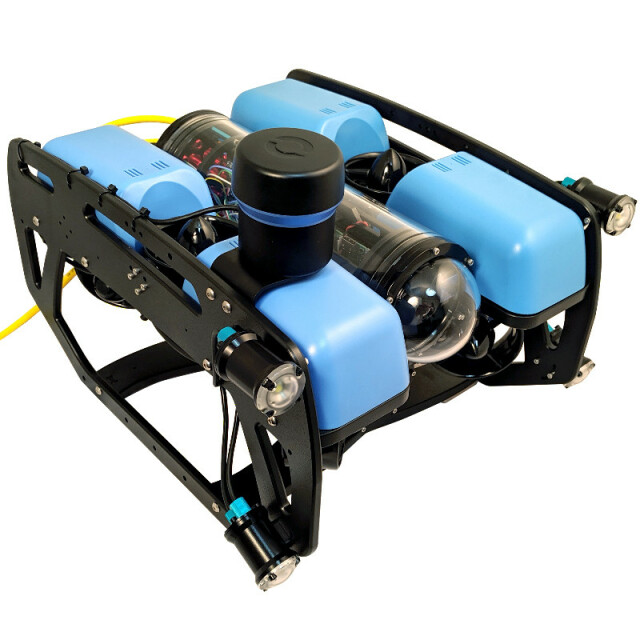
• Depth Rating up to 300 metres – Configured with either acrylic plastic (100 m) or anodized aluminum enclosures (300 m)
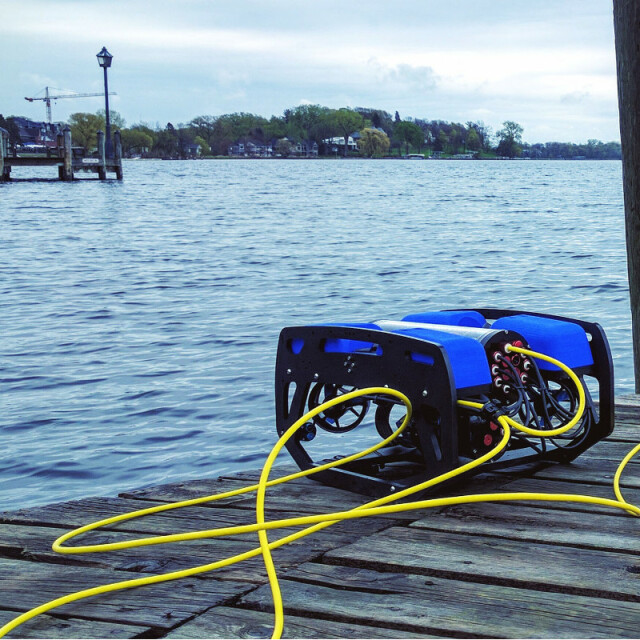
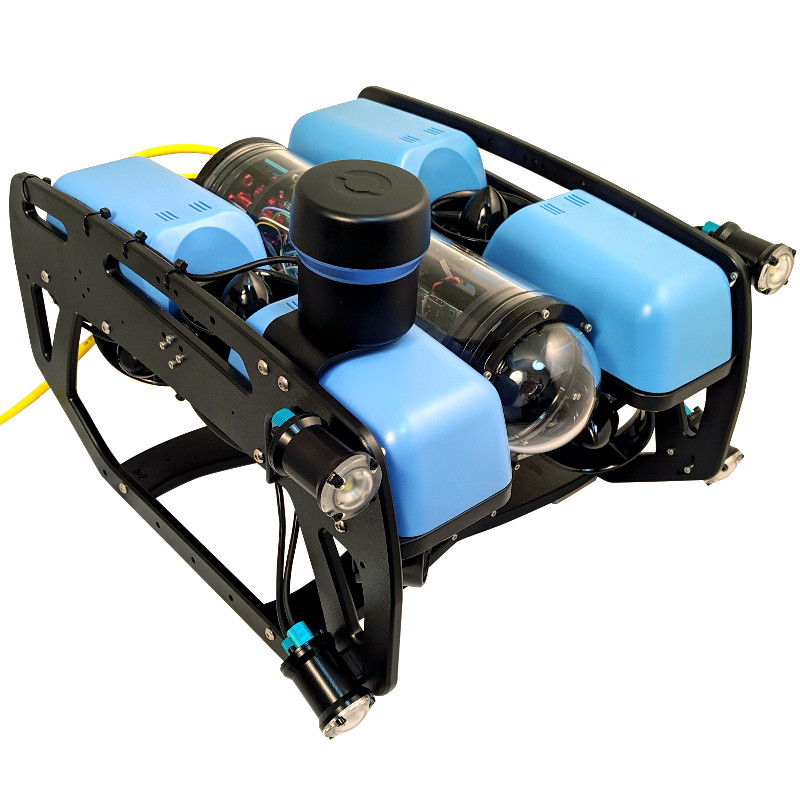
• Modular Frame Design and Expandability – Designed like a work/research class ROV with a simple yet robust and expandable frame
• Powered by the Navigator Flight Controller and BlueOS – Purpose-built controller for ROVs with an inertial measurement unit (IMU), magnetometer, and a leak sensor. Coupled with a Rasberry Pi 4 computer, which runs the open-source BlueOS software.
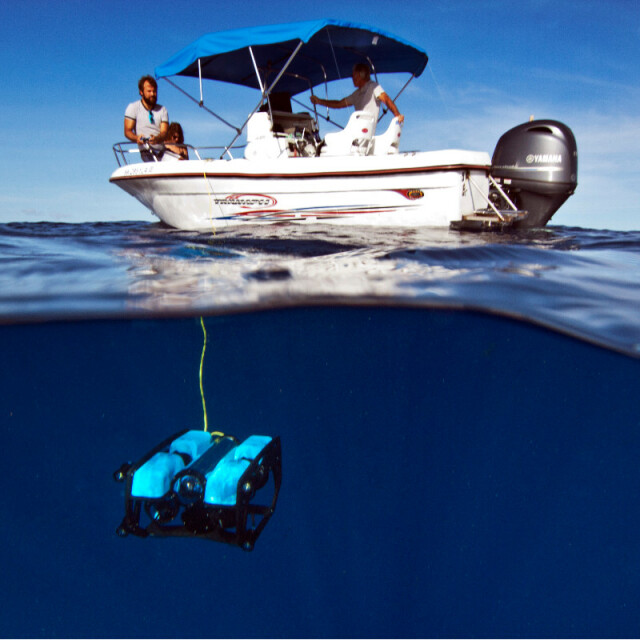
• Various Accessories and Add-ons Available – From the tether length, through additional lights and thrusters, your BlueROV2 is configurable from the start! Once you have the basics, it can be expanded with a gripper, a spool, sonars, and endless integrations.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Desktop platform support
Windows
Area of Application
Underwater Remote Operated Vehicle
Compatible ROVs
BlueRobotics Systems
-
Additional Features
-
Customer support
Yes
User interface language
Yes
-
Requirements
-
Software
BlueROV2 software
-
Data Capturing
-
Payload manager (for different sensor configurations)
Yes
Post-flight data quality check
Yes
Manual photo control
Y
Vertical and oblique photoshooting
Y
Data Management Output
Y
Real Time Streaming Data
Y
Data Playback
Y
Data Archival
Y
Streaming Screencast
Y
Networkable
Y
Export to Standard Video Files
Y
Logged & Synchoronized
Y
Geo-referenced Data
Y
Supports Multiple Videos
Y
-
Data Output
-
Export data to cloud applications tool
Optional
Replay flights
Y
-
Flight Planning Characteristics
-
Mission Planning
Y
Waypoints
Y
Geo-referenced Charts
Y
Integrated Sonar
Y
Integrated Video
Y
Markers
Y
Heads-Up display
Y
Measuring Tools
Y
Configurable Video Overlay
Y
-
Geo-Referencing / Navigation
-
Navigation Sensors
Y
INS
N
Doppler Velocity Log
Y
USBL
Y
LBL
Y
GPS
Y
-
Vehicle Control and Positioning
-
Dynamic Positioning
Y
Station Keeping
Y
Waypoint Execution
Y
Real-time Supervision
Y
Cruise Control
Y
Mission execution
Y
-
Flight Modes
-
Click to Acquire
Y
Automated Target Reacquisition
N
GOTO position
Y
Sonar Target Tracking
Y
Automated Target Tracking
Y
Flight modes
Semi-Automatic
Mission progress monitoring
Optional
3D flight planning
Y
Map-caching and offline planning
Y
Data import types
Multiple types
Background map options (WMS, importable)
Yes
Multi-operator support
No
Show camera footprint on map
Y
Show Sonar Fan On Map
Y
Documents
Brochure
br_bluerov2_datasheet_rev2022-R4ROV.pdf
Other documents
-
BlueROV2 Datasheet1.06 MB




{kind=link}