
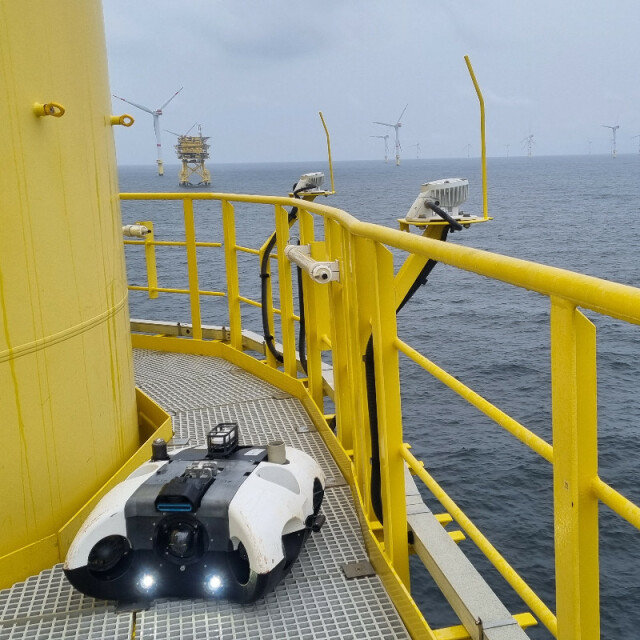











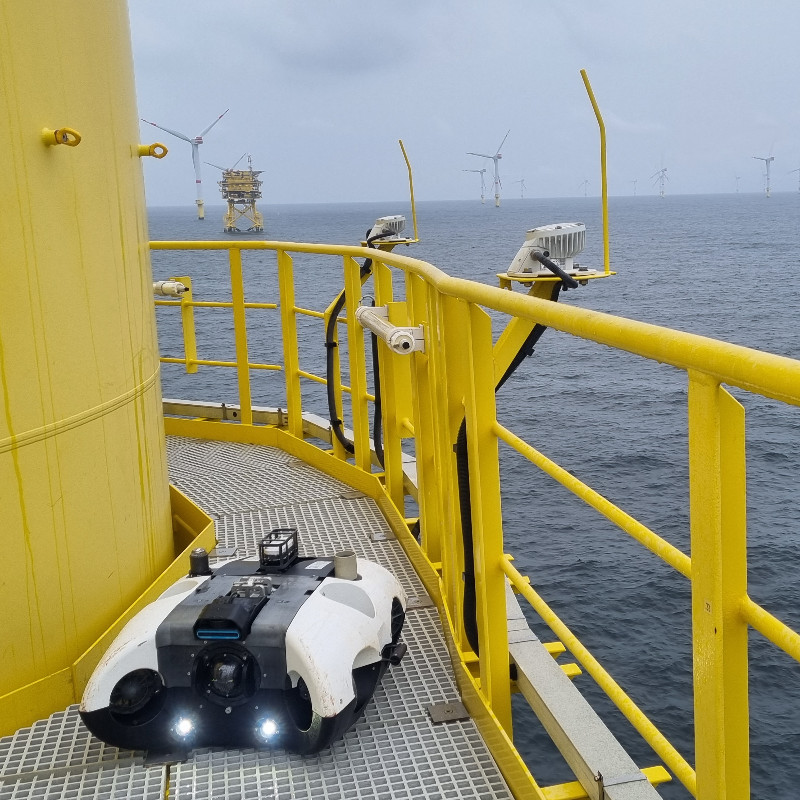





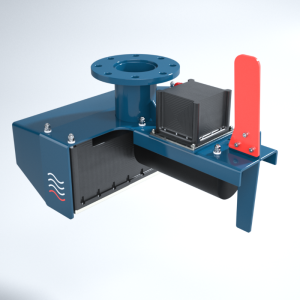
A.IKANBILIS - Tetherless Hovering AUV
Hovering Autonomous Underwater Vehicle (HAUV) for underwater inspection applications
Unlock new levels of operational efficiency using AI-controlled tetherless operation and state-of-theart sensor fusion
Subsea Europe Services GmbH
Halstenbek, DE
Description
Harnessing a powerful AI controller, A.IKANBILIS is designed to simplify and reduce the risk and cost of underwater inspections using a fully autonomous workflow through planning and subsea operations to produce actionable reports with geo-referenced hydrographic data and video without human intervention.
A.IKANBILIS is built to deliver multi-layered geo-referenced datasets with unmatched efficiency in diverse applications by using trained behaviours for specific mission types such as pile inspection, anode capacity monitoring and thickness measurements.
The system is capable ocan conduct without human activity in the loop, saving time and producing high-quality, actionable data. For example, a visual inspection at a port with 107 jetties required ~10 diver-days; the diver days job took A.IKANBILIS has just two days to complete.
KEY FEATURES
- True ‘launch & leave’ autonomous underwater inspection allows for significant cost savings and the use of existing infrastructure instead of specialised vessels
- Tetherless operation across the six degrees of freedom reduces operational risks of entanglement while extending agility underwater
- Autonomous re-tasking delivers mission flexibility that allows for unplanned discoveries and issues to be addressed and added to the original mission parameters
- Current fighting capabilities extend the window of operation so that inspection can continue even as conditions underwater become tougher to work in
- Battery-powered operations increase the speed of mobilisation and enable significant reduction in CO2 emissions
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Area of Application
Underwater Inspection
Desktop platform support
Windows, macOS, Ubuntu
-
Vehicle Control and Positioning
-
Dynamic Positioning
N
Autopilots
Altitude
Station Keeping
Y
Waypoint Execution
Y
Real-time Supervision
Y
Cruise Control
Y
Mission execution
Y
-
Flight Modes
-
Click to Acquire
Y
Automated Target Reacquisition
Y
GOTO position
Y
Sonar Target Tracking
Y
Automated Target Tracking
Y
Flight modes
Automatic
Auto-return to target
Y
No-fly zone integration
Y
Multi-flight mission support
N
3D flight planning
Y
Live weather updates
Y
Map-caching and offline planning
Y





{kind=link}