
Argonaut-XR
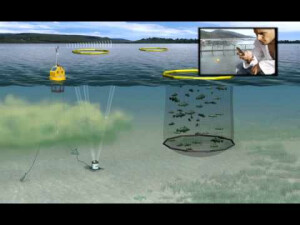
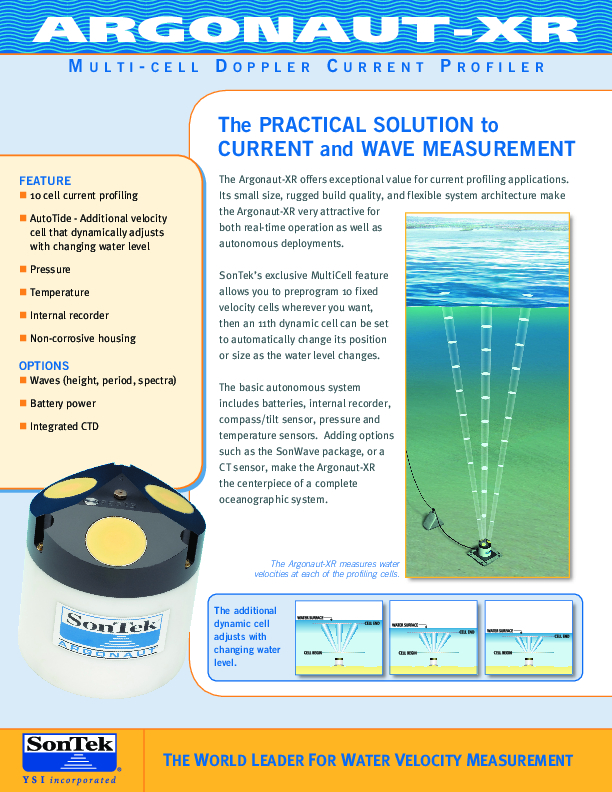
The Argonaut-XR is ideal for near-shore deployments in less than 40 m of water. Designed for mounting near-shore or a harbor, the XR features a special mode that automatically adjusts one of its measurement cells for changing water level.

SonTek
San Diego, US
Description
The Argonaut-XR is ideal for near-shore deployments in less than 40 m of water. Designed for mounting near-shore or a harbor, the XR features a special mode that automatically adjusts one of its measurement cells for changing water level.
Do you have questions about this product?
- Questions about price, availability, and/or retailers
- Questions about technical specifications and usage
- Questions about suitability for your project or application
Specifications
-
General
-
Length [m]
0.15
Width [m]
0.15
Height [m]
0.18
Weight in air [kg]
2.5
Weight in water [kg]
0.3
Min. operating power [V]
7
Max. operating power [V]
15
Max. operating depth [m]
200
Max. battery lifetime [days]
220
True Bottom Tracking Capability
N
-
Other specifications
-
Real-time interfacing
RS232; RS422; SDI-12; Modbus
Min. external power [Voltage]
110
Max. external power [Voltage]
240
Max. cable length [m]
1500
Baudrate [kbit/s]
115.2
External battery container
Y
Data acquisition software and processing software
Variable: dependent on application; ViewArgonaut
-
Auxiliary Sensors
-
Conductivity
Y
Oxygen
N
Turbidity
N
Tides
Y
Waves
Y
Pressure
Y
Acoustic modem
N
Relocation of transponder
N
Wave direction
N
Speed of sound
N
-
Deployment method
-
Moving vessel
N
Bottom mount
Y
Inline string mooring
N
Data Buoy
N
Marine structures
N
-
Doppler Current Profiler
-
Center working frequency [kHz]
750 or 1500 or 3000
Max. typical profiling range [m]
40
Number of beams
3
Nadir angle [deg]
25
Max. Number of cells per beam
10
Min. blanking distance [m]
0.2
Max. ping rate [Hz]
1
Min. vertical resolution [m]
0.2
Min. cell size [m]
0.2
Max. cell size [m]
15
Cell overlap [%]
50
Max. velocity [m/s]
6
Speed dependent uncertainty: horizontal [%]
1
Speed independent uncertainty: horizontal [cm/s]
0.5
Speed dependent uncertainty: vertical [%]
1
Speed independent uncertainty: vertical [cm/s]
0.5
Surface reference capability
Y
Surface current measurement
N
Compensation for sound speed
Y
Single ping rejection of outliers
Y
-
Standard Sensors
-
Temperature: min [°C]
-5
Temperature: max. [°C]
45
Temperature: uncertainty [°C]
0.1
Tilt: max. [deg]
60
Tilt: uncertainty [deg]
1
Compass type
Magnetic
-
Application
-
Typical applications
Coastal water oceanography; waves; port and harbours; fisheries monitoring and assesment; low-cost applications
Documents
Brochure
migratione4rtdl.pdf
1.36 MB
Other documents
-
ADVOcean Used in NPS AUV Research734.17 KB
-
SonTek Argonaut-ADV Application Notes1.93 MB
Videos






{kind=link}